




























b. Re-enable the robotic arm: motion_enable(true)
c. Set the motion state: set_state(0)
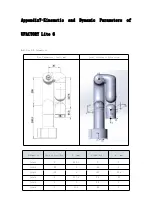
Appendix2-Technical Specifications
1.1
Lite 6
Specifications
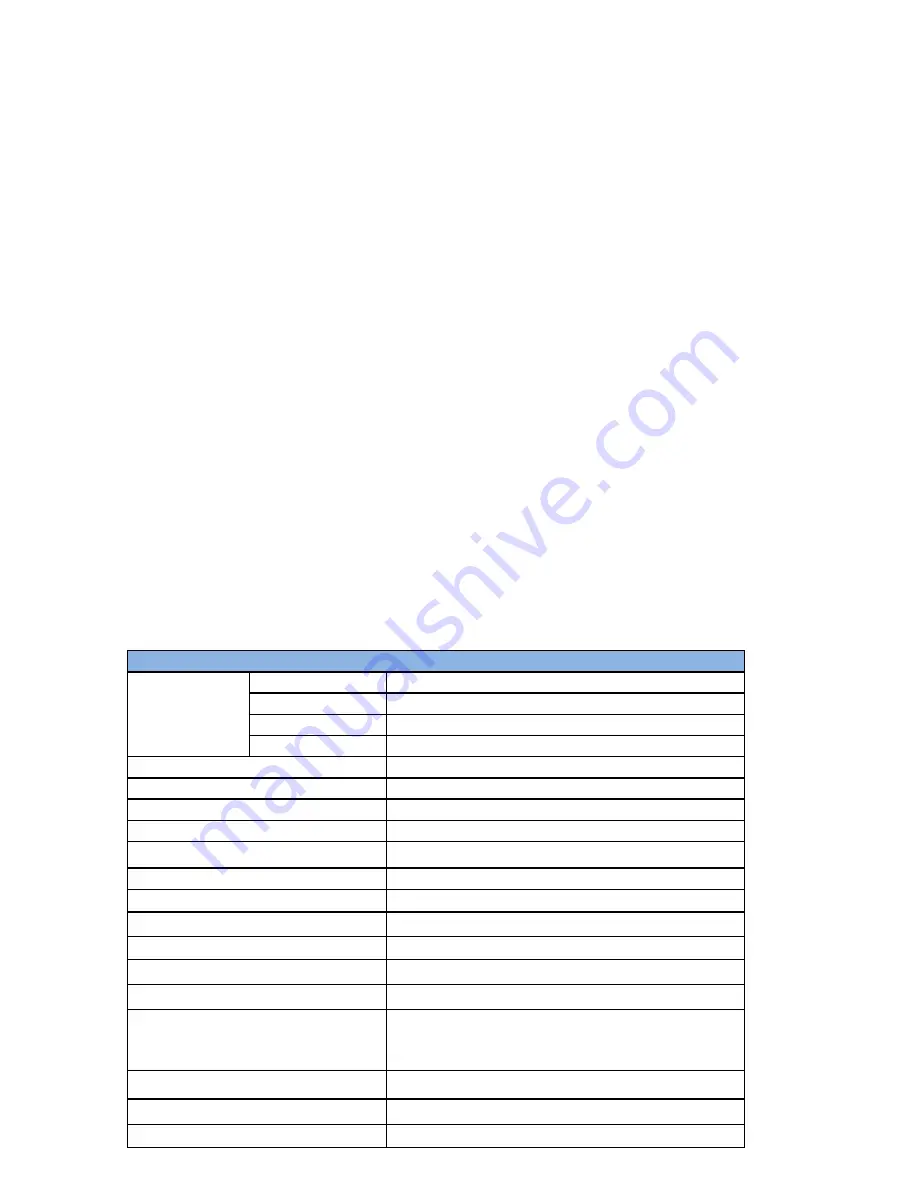
Lite 6
Cartesian Range
X
±440mm
Y
±440mm
Z
-165mm~683.5mm
Roll/Yaw/Pitch
± 180°
Maximum Joint Speed
180°/s
Reach
440mm
Repeatability
±0.2mm
Max Speed of End-effector
500mm/s
*Ambient Temperature Range
0-50 °C*
Power Consumption
Min 4.8 W, Max 350W
Input Power Supply
24 V DC, 14.5 A
ISO Class Cleanroom
5
Robotic Arm Mounting
Any
Programming
UFACTORY Studio/Python/C++/ROS
Robotic Arm Communication Protocol
Private TCP
End-effector I/O Interface
2 Digital inputs, 2 Digital outputs,
2 Analog inputs
End-effector Communication Protocol
Modbus RTU
Footprint
227.6 cm
2
Materials
Aluminium, Carbon Fiber






































































