





























Lite 6 User Manual-Hardware Section
1. Hardware Installation Manual
1.1. The Hardware Composition of the robot
1.1.1.
Hardware Composition
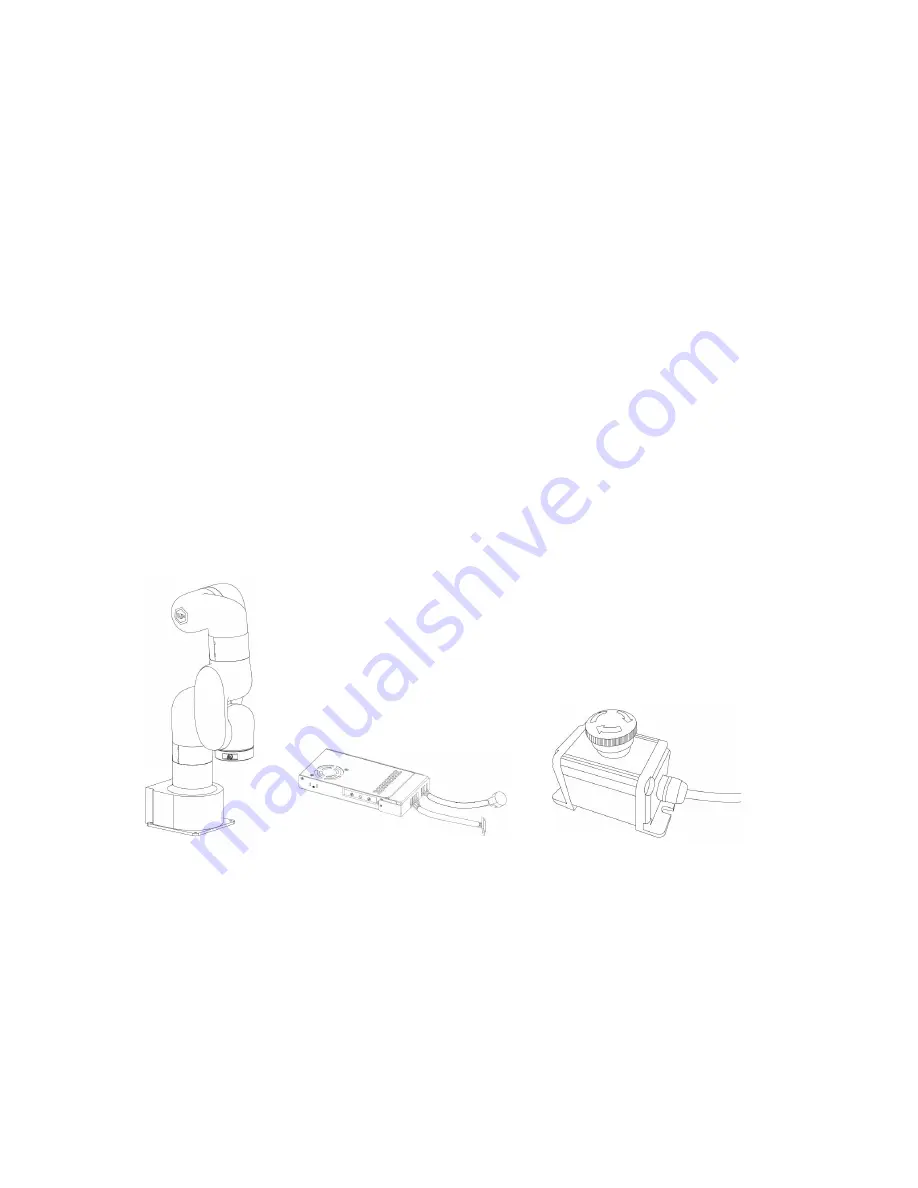
The composition of robotic arm hardware includes:
Robotic Arm(Figure 2-1)
Power Adapter (Figure 2-2)
Emergency Stop Button (Figure 2-3)
The Lite 6 robotic arm system consists of a base and rotary joints, and
each joint represents a degree of freedom.
From the bottom to the top,
in order, Joint 1, Joint 2, Joint 3, etc. The last joint is known as the
tool side and can be used to connect end-effector (e. g. gripper, vacuum
gripper, etc).
Figure 2
-
2
Figure 2-1
Figure 2
-
3


































































