





























motion trajectory.
Steps for setting the initial position:
1. Click【Settings】button on the homepage.
2.
Enter 【Motion, then click the 【Set】 button next to the
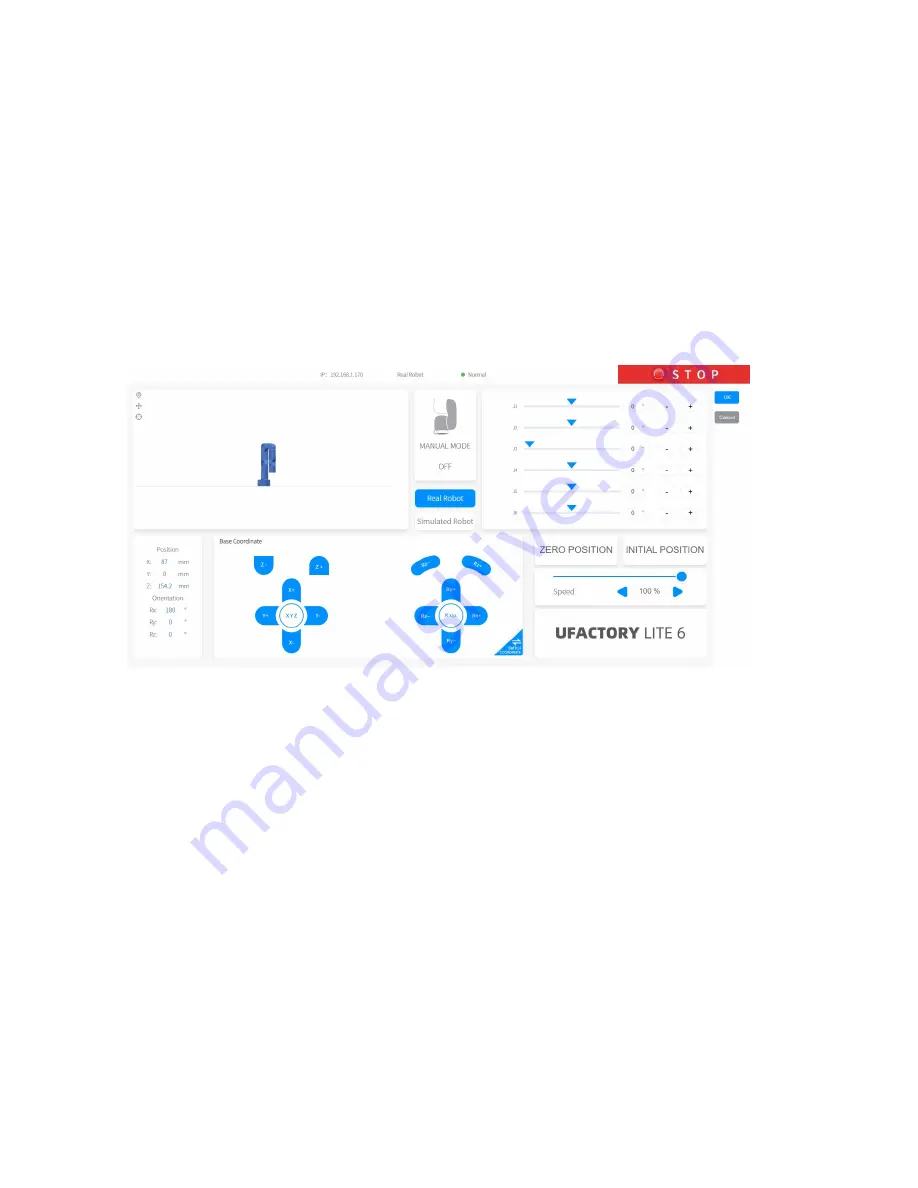
Initial Position.
3. Set the initial position of the robot in Live-control.
【OK】: Save the changes.
【Cancel】: Cancel the changes.
1.4.2
End Effector
When the end effector provided in the option is installed at the end
of the Lite6, select the corresponding end effector.
The end effectors currently supported by Lite6 are:Gripper, Vacuum
Gripper.
Take the Gripper as an example.
Lite6 Gripper







































































