





























3. End-Effector
3.1. Gripper
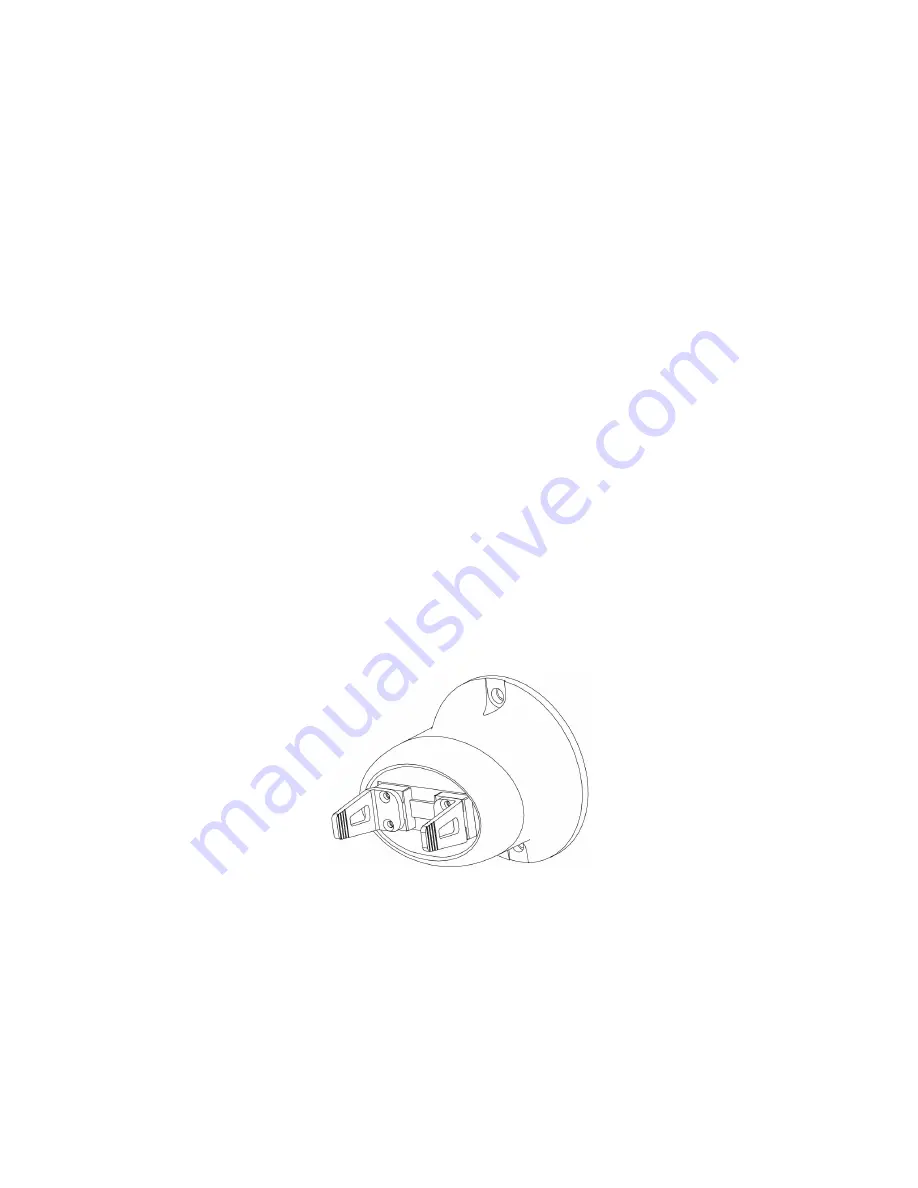
The gripper is the end-effector of the robotic arm, which can grasp
objects
dynamically.
There
are
two
installation
methods
for
the
mechanical claw of Lite 6: normal installation, the stroke range of the
mechanical claw is 0-16mm, and reverse installation, the stroke range of
the mechanical claw is 22-38mm. Regardless of the installation method,
the stroke of the gripper is only 16mm.The maximum payload of the gripper
≤1kg.
There are two states of the gripper, open and close.
3.1.1.
Gripper Installation
Installation of gripper:
1. Move the robotic arm to a safe position. Avoid collision with the
robotic arm mounting surface or other equipment;
2. Power off the robotic arm by pressing the emergency stop button on the
control box;
3. Fix the gripper on the end of the robotic arm with 2 M6 bolts;






































































