

















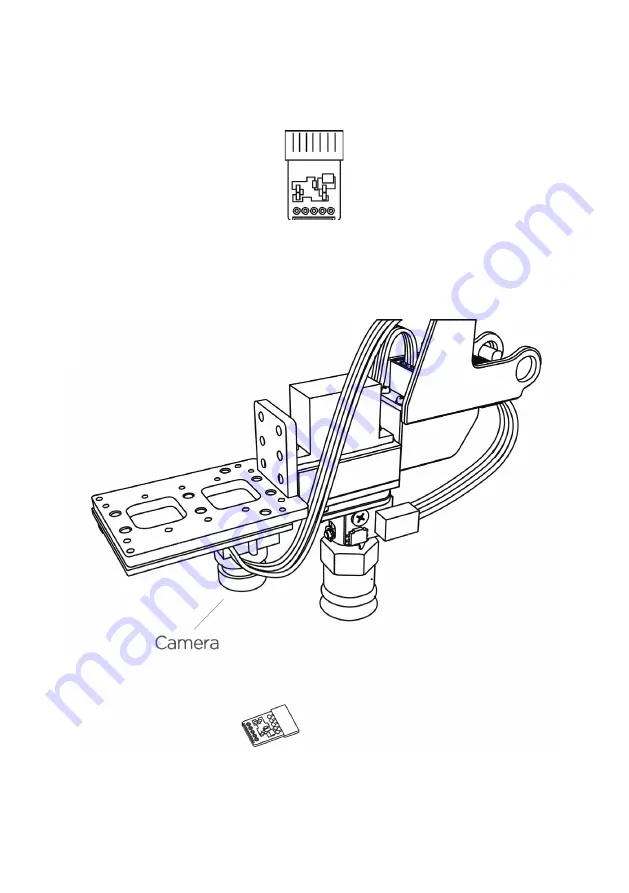
Step 7 : Make sure the desktop is clean and non-reflective. Place an easy-to-recognize object on
the table, such as a small PCB with resistors.
Step 8 : Place the robotic arm about 25 cm above the target object to let the Open MV recognize
the object.
Step 9 : Power on the arm and connect it to the computer to turn on the power switch of the
arm. Launch the Arduino IDE ( download the Arduino IDE) https://www.arduino.cc/en/Main/-
Software ), select the correct COM port : COM (Arduino/ Genuino Mega or Mega 2560)
35







































































