
















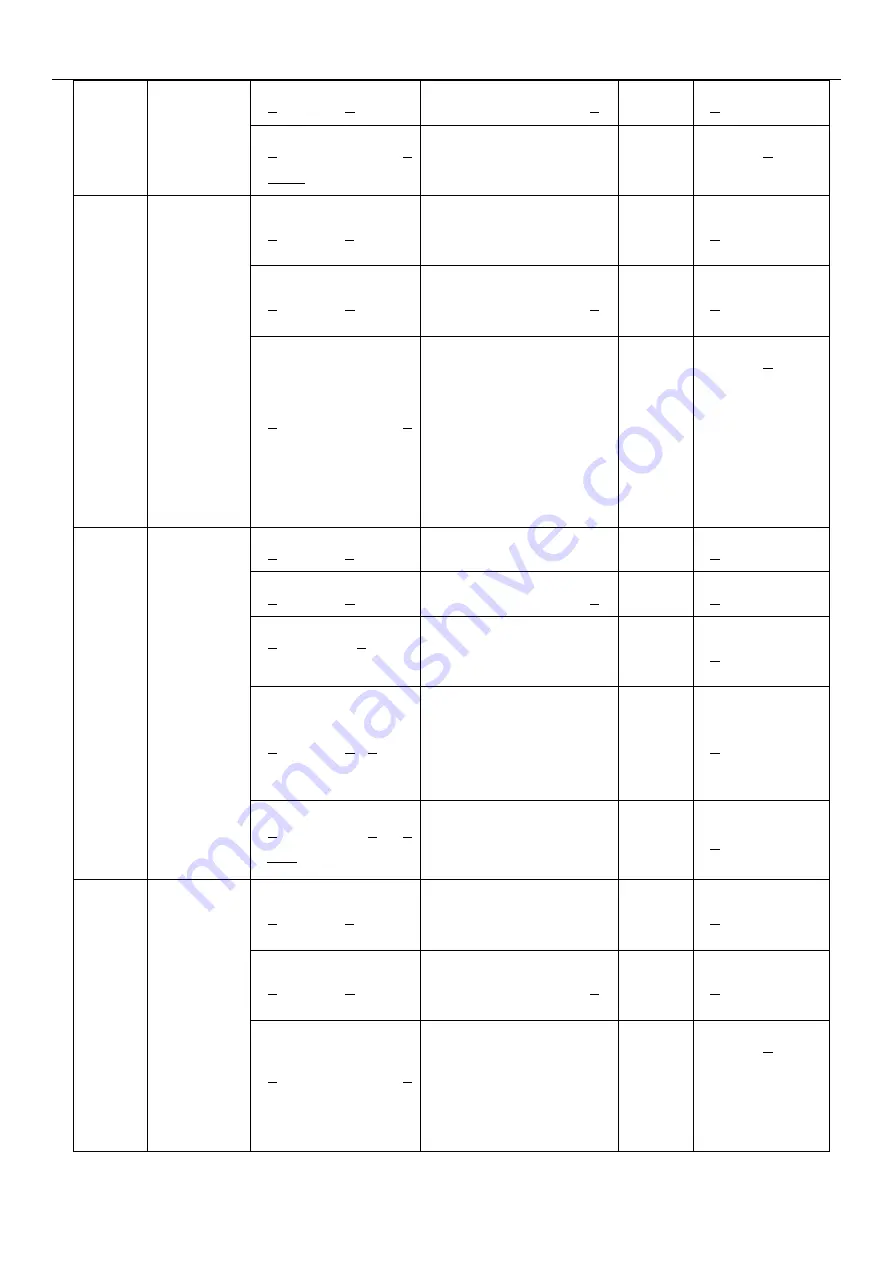
38
Temperatur
e &
Humidity
#
n
M2305 P
0
N15\n Init Module 15 in Port
0
0
$
n
ok \n
#
n
M2306
P
0
V
1000
\n
Set report interval (ms)
0
@11 P
0
N15
T23.3 H82.2\n
16
PIR Sensor
#
n
M2304 P
3
\n
Deinit
3, 4, 5,
8, 9
$
n
ok \n
#
n
M2305 P
3
N16\n Init Module 16 in Port
3
3, 4, 5,
8, 9
$
n
ok \n
#
n
M2306
P
3
V1000\n
Set report interval (ms)
3, 4, 5,
8, 9
@11 P
3
N16
V1\n
1:
Motion
detected
0: no motion
detected
17
1602 LCD
#
n
M2304 P
0
\n
Deinit
0
$
n
ok \n
#
n
M2305 P
0
N17\n Init Module 17 in Port
0
0
$
n
ok \n
#
n
M2307 P
0
R128
G120 B10\n
Set backlight color
0
$
n
ok \n
#
n
M2307 P
0
T
0
\n
0: turn off display
1: turn on display
2: clear
0
$
n
ok \n
#
n
M2307 P
0
V
0
S
Test
\n
V(0~1): row selected
S: the display string
0
$
n
ok \n
18
Line Finder
#
n
M2304 P
3
\n
Deinit
3, 4, 5,
8, 9
$
n
ok \n
#
n
M2305 P
3
N18\n Init Module 18 in Port
3
3, 4, 5,
8, 9
$
n
ok \n
#
n
M2306
P
3
V1000\n
Set report interval (ms)
3, 4, 5,
8, 9
@11 P
3
N18
V1\n
0:
object
detected
Summary of Contents for uArm Swift Pro
Page 1: ......
Page 3: ...3 1 Introduction 28 2 Example 28 3 Commands tbd 28 UARM COMMUNITY 40 RELEASE NOTE 40...
Page 5: ...5 2 Reference Frame...
Page 8: ...8 4 Mounting...
Page 9: ...9...
Page 11: ...11 6 Extension Description...
Page 12: ...12 Details of 30P Base Extension...
Page 18: ...18 Now you are able to send the command to the uArm Let s send G0 X250 Y0 Z130 F10000...
Page 21: ...21 Set the parameter of serial monitor in the right bottom like the picture below...







































































