





























138
【
】
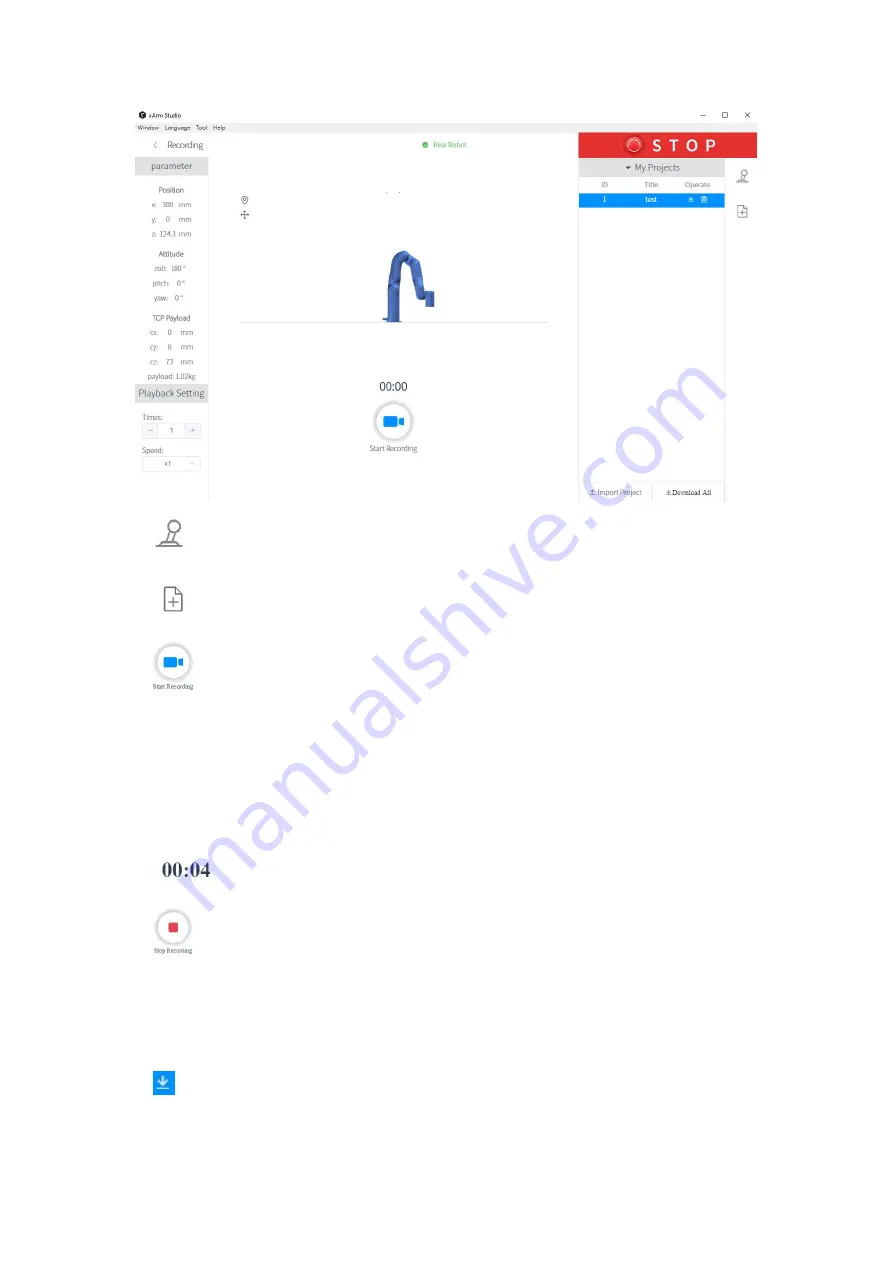
Pop-up live control panel.
【
】
Create a new recording file.
【
】
Manual Mode will be turned on accordingly by clicking on the button, and
the robotic arm can be dragged directly for trajectory recording. When
starting recording, be sure to pay attention to the load state of the robotic
arm, so as to avoid the big difference between the actual load and the set
load of the robotic arm, resulting in its self-motion.
【
】
Display recording time.
【
】
Stop recording.
【
Times
】
Set playback times.
【
Speed
】
Set playback speed.
【 】
Download the file.





































































