





























94
shown in the above figure).
The current robotic arm must be mounted on a steady floor if automatic
identification is selected. The robotic arm needs to run a series of action
commands to calculate the parameters of TCP payload. In addition, it is
important to ensure the safety of equipment and personnel near the
robotic arm.
Note: Once the name of the new payload has been determined, it
cannot be changed.
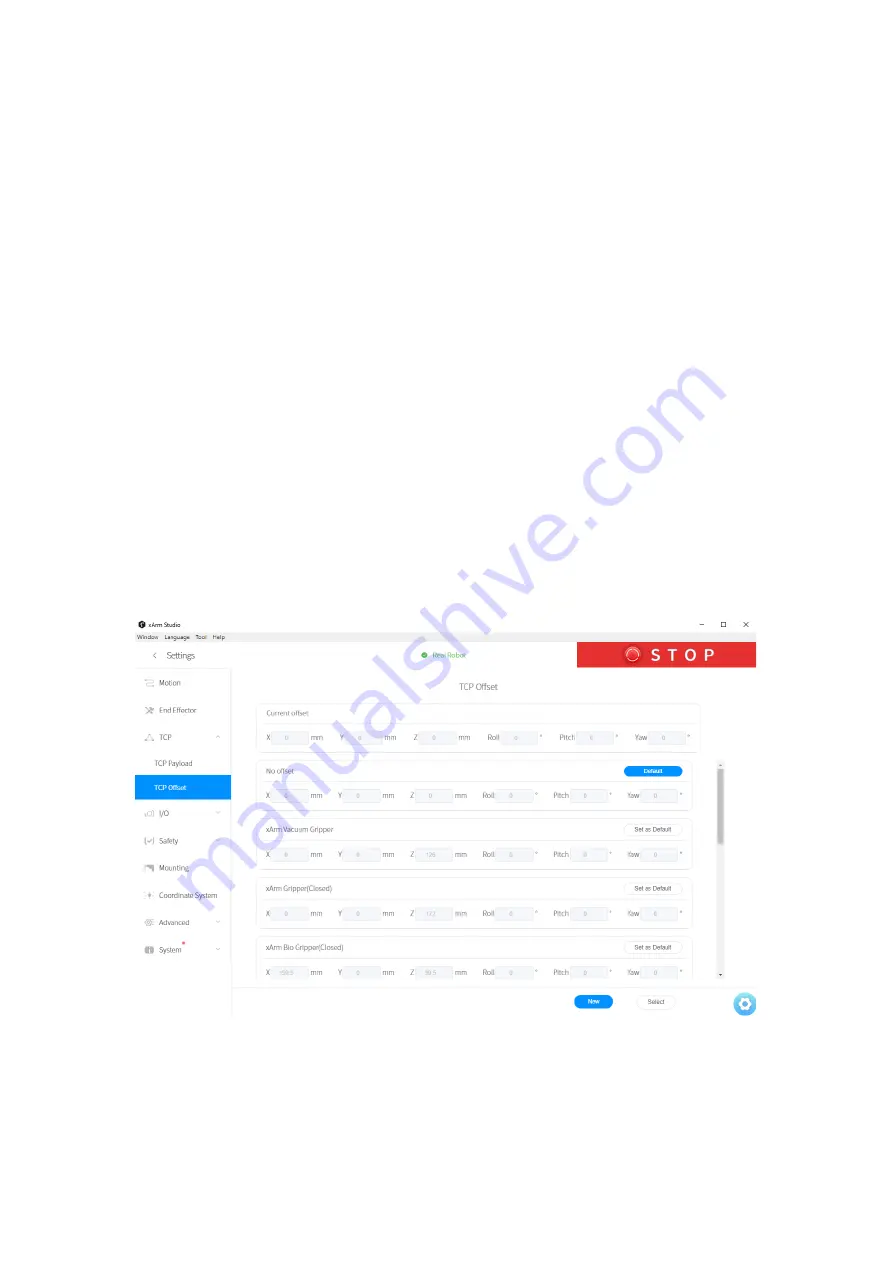
1.4.3.2 TCP Offset
On this page, the current offset of the robotic arm can be set and the
additional TCP offset data can be recorded. The additional TCP offset





































































