



























UI Robot Technology Co. Ltd.
M4220161122CN
Page 29
UI
– SR Series User Manual
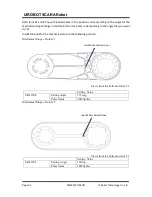
5.1.1
Max. Pulse Range of Joint #1
The 0 pulse position of Joint #1 is the position where Arm #1 faces towards the positive direction
on the X-coordinate axis.
When the 0 pulse is starting point, the anticlockwise pulse value is defined as the po)
and the clockwise pulse value is defined as the negative(-).
A: Max.Motion Range
B: Max.Pulse Range
SR 4150LS
±135 deg.
±
38250pulse
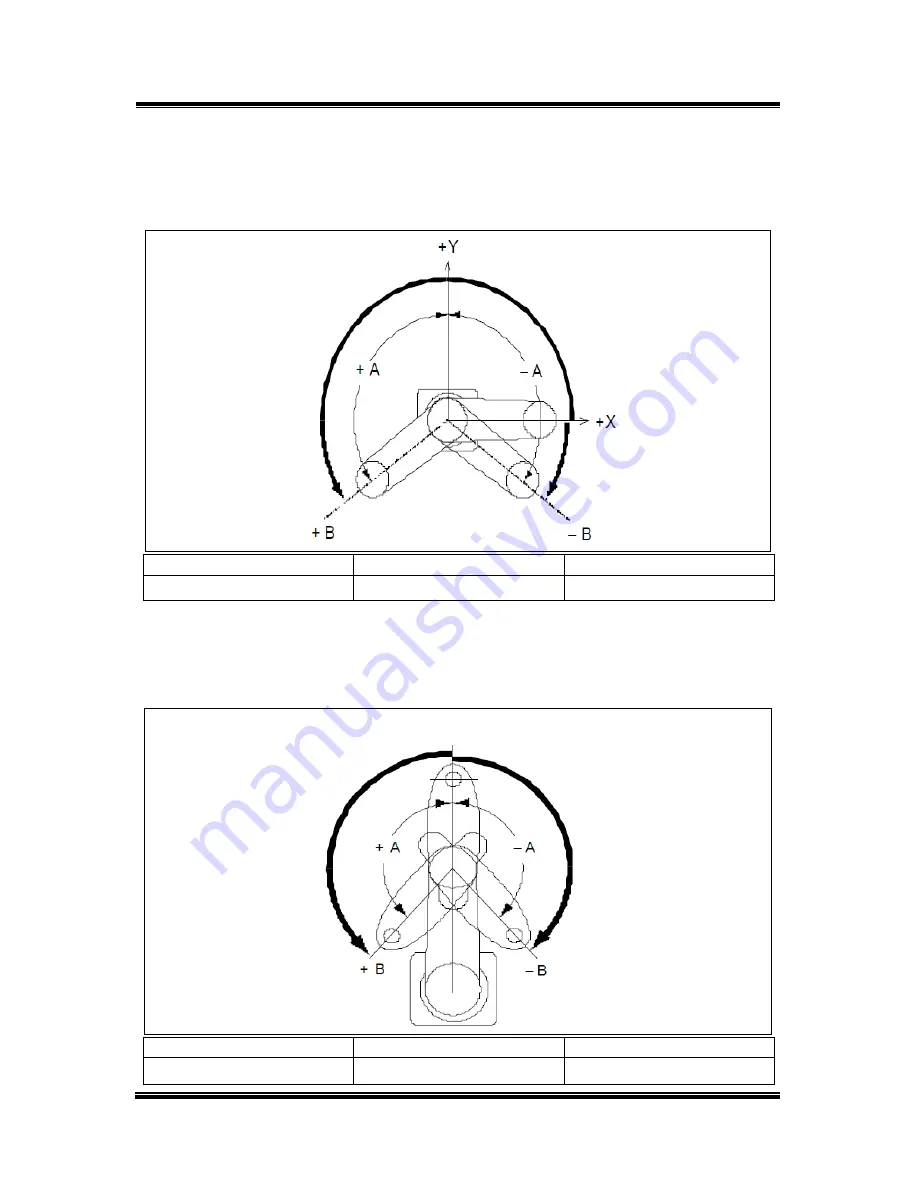
5.1.2
Max. Pulse Range of Joint #2
The 0 pulse position of Joint #2 is the position where Arm #2 is in-line with Arm #1. With the 0
pulse as a starting point, the anticlockwise pulse value is defined as the po) and the
clockwise pulse value is defined as the negative(-).
A: Max.Motion Range
B: Max.Pulse Range
SR 4150LS
±135deg.
±
38250 pulse
0 Pulse
0 Pulse



































































