





























A1 PRO User Manual
2018 Unitree All Rights Reserved
24
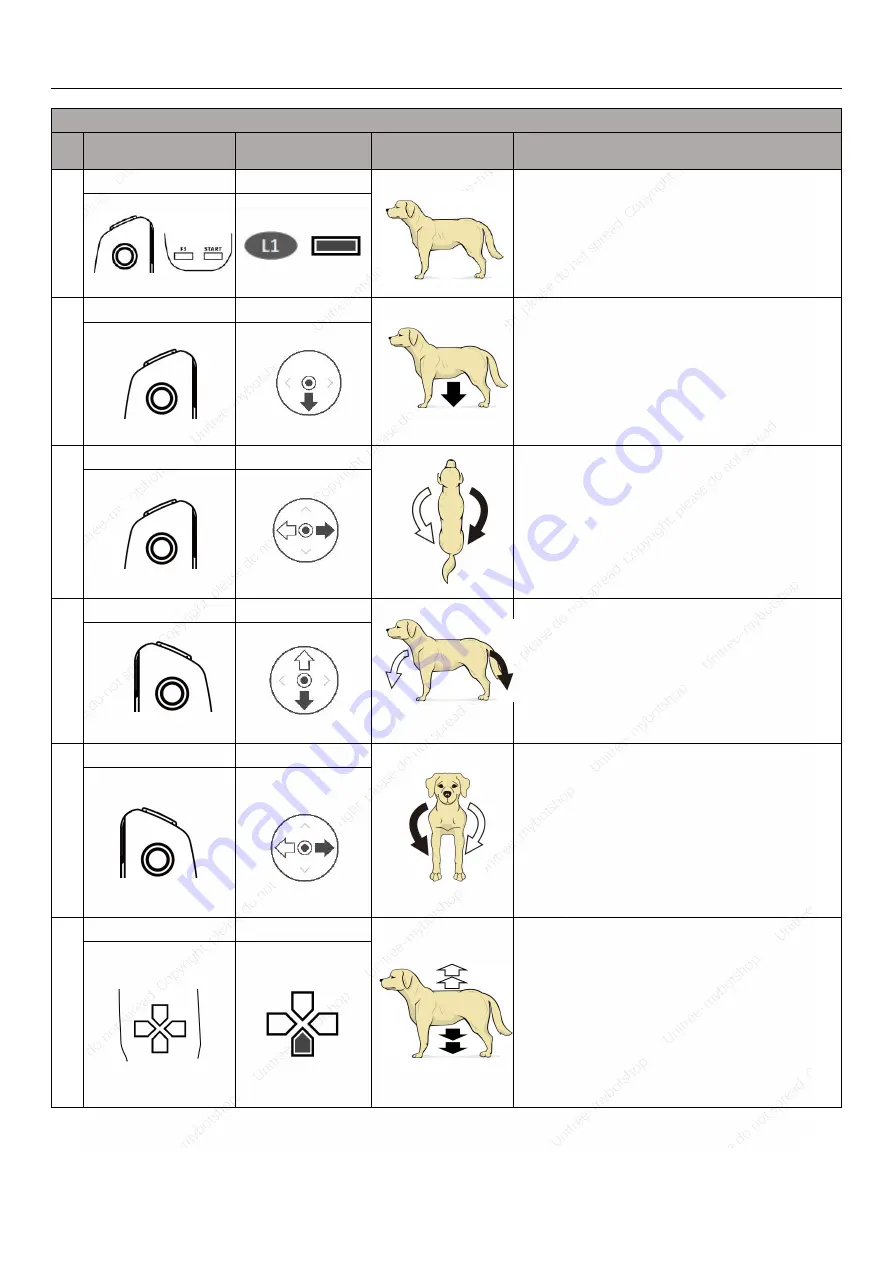
1.Basic Action under “Sport Mode” (3-Axis Attitude and 3-Axis Position Control when Standing)
NO
The Position of Stick or
Button on Joystick
Operation Diagram
Robot Schematic
Remarks
1
L1 Button
START Button
L1 Button START Button
When the robot dog is turned on and standing , after holding
down the L2 button, single-click the B button, the robot dog
squats and lies on the ground, enters the damping mode;
then hold down the L1 button, single-click the START button,
this time will When there is obvious current sound, the robot
dog stands again; release the L1 key and click the START key
once to enter the sport mode.
2
Left Stick
Left Stick
When the robot dog is standing in Sport mode, the left stick is
used to control the robot body to lift or squat.
Push the stick up, robot body lifts up. Push the stick down, the
robot squats. When the stick is in the middle position, the
robot is in a static standing state (the body position is in the
initial state after power on).
3
Left Stick
Left Stick
When the robot dog is standing in Sport mode, the left Stick is
used to control the yaw of the robot.
Push the stick to the left, the robot is twisted to the left. Push
the stick to the right, the robot is twisted to the right. In the
middle position, the yaw angular of body is zero.
The more the stick is pushed away from the center position,
the greater the yaw angular.
4
Right Stick
Right Stick
When the robot dog is standing in Sport mode, the right Stick
is used to control the pitch of robot. (lean forward and
backward)
Push the stick up, robot body leans forward. Push the stick
down, robot body leans backward. When the stick is in the
middle position, robot body is in a horizontal position.
The more the stick is pushed away from the center position,
the greater the yaw angle.
5
Right Stick
Right Stick
When the robot dog is standing in Sport mode, the right Stick
is used to control the robot body roll.
(When the robot faces the operator) Push the stick to the left ,
robot body rolls to the right. Push the stick to the right, robot
body rolls to the left. The robot body does not roll when the
Stick is in the middle position.
The more the stick is pushed away from the center position,
the larger the roll angle.
6
Left Button
Left Button
When the robot dog is standing in Sport mode, the left button
is used to control the robotic body's jog lift and jog squat.
Press the up button and the robot body is lifted up. Press the
down button and the robot body will be clicked.
Note: Please keep in mind the number of key presses. After
the end of the action, please adjust back to the static standing
state of the robot, otherwise the robot's battery life may be
greatly reduced.
哈哈 哈哈哈 哈哈







































































