





























3.3. Robot Control
Configuration
With these buttons you can change the joint position in such a way that the tool
of the robot does not change position, but the robot arm changes side. Beware
of collisions when using this feature.
3.3.2
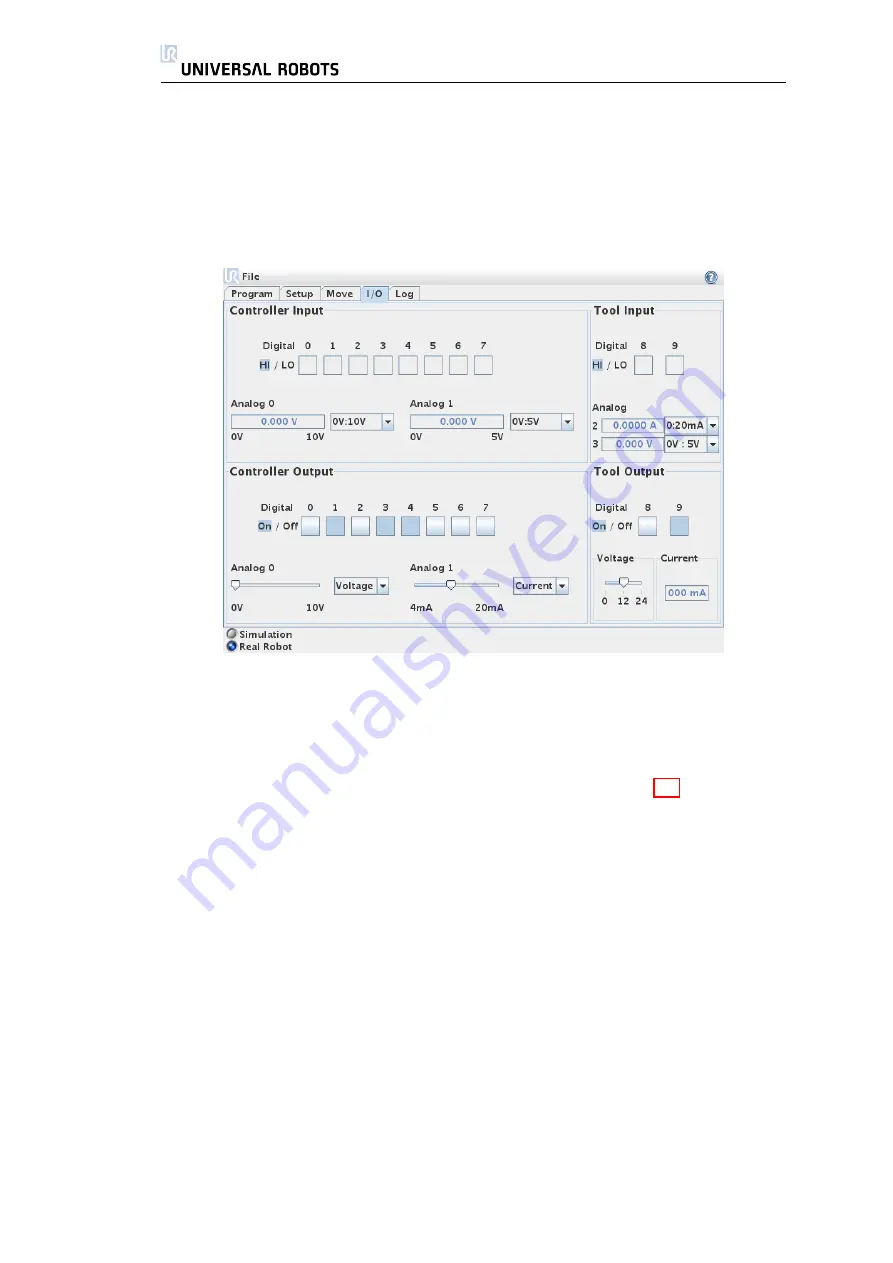
I/O Tab
On this screen you can always monitor and set the I/O signals from/to the
robot. The screen displays the current state of the I/O, inluding during program
execution. If anything is changed during program execution, the program will
stop. At program stop, all output signals will retain their states. The screen is
updated at only 10Hz, so a very fast signal might not display properly.
The electrical details of the signals are described in section 2.1.
Analog Range Settings
The analog output can be set to either current [4-
20mA] or voltage [0-10V] output. The analog input ranges adjusted to be from
[-10-10V] to [0-5V]. The settings will be remembered for eventual later restarts of
the robot controller when a program is saved.
40
UR-6-85-5-A
Summary of Contents for UR-6-85-5-A
Page 1: ...UR 6 85 5 A User Manual Version 1 11 January 2010...
Page 2: ...2 UR 6 85 5 A...
Page 6: ...Contents 6 UR 6 85 5 A...
Page 16: ...1 4 Mounting Instructions 16 UR 6 85 5 A...
Page 33: ...Chapter 3 PolyScope Software 33...







































































