





























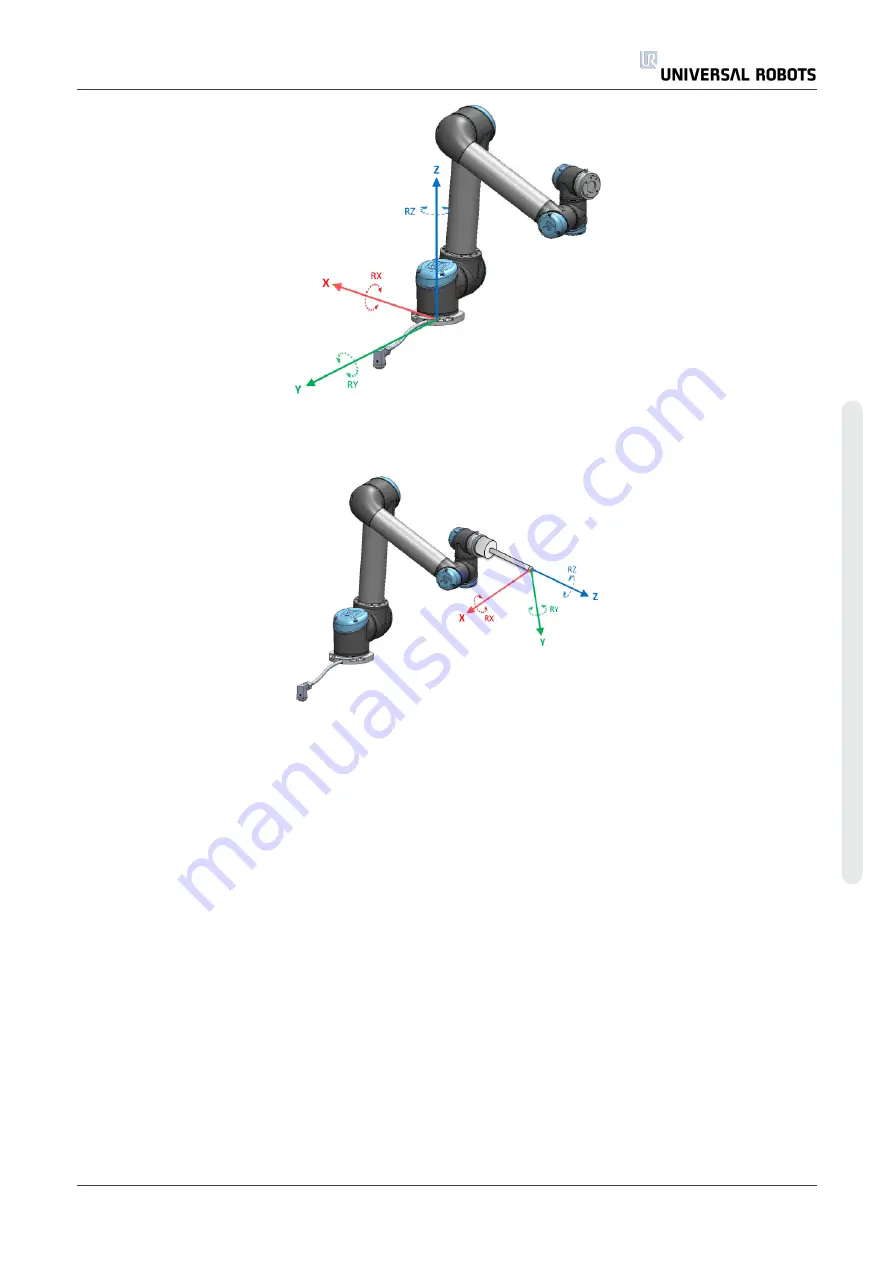
15.1:
Base feature
15.2:
Tool (TCP) feature
Use the Point feature, Line feature and/or Plane feature to define a feature pose.
These features are positioned through a method that uses the current pose of the TCP in the
work area. So you can teach feature locations using Freedrive , or "jogging" to move the robot to
the desired pose.
Selecting a feature depends on the type of object being used and the precision requirements.
Use the Line feature and Plane feature where possible as they are based on more input points.
More input points mean higher precision.
For example, you can accurately define the direction of a linear conveyor, by defining two points
of a Line feature with as much physical separation as possible. You can also use the Point
feature to define a linear conveyor, however, you must point the TCP in the direction of the
conveyor's movement.
Using more points to define the pose of a table means that the orientation is based on the
positions rather than the orientation of a single TCP. A single TCP orientation is harder to
User Manual
141
UR10
C
o
p
yr
ig
h
t
©
2
0
0
9
–
2
0
2
0
b
y
U
n
iv
e
rs
a
l
R
o
b
o
ts
A
/S
.
A
ll
ri
g
h
ts
re
s
e
rv
e
d
.
Summary of Contents for UR10/CB3
Page 1: ...Universal Robots User Manual UR10 CB3 Original instructions en...
Page 28: ...UR10 20 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 30: ...UR10 22 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 36: ...UR10 28 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 56: ...UR10 48 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 62: ...UR10 54 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 64: ...UR10 56 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 72: ...China RoHS UR10 64 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 73: ...KCC Safety User Manual 65 UR10 Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 92: ...UR10 84 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 116: ...UR10 108 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 124: ...UR10 116 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 164: ...UR10 156 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 214: ...UR10 206 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...


































































