





























That means the
if...then
expression (or other necessary statements to determine the following
waypoint, e.g. variable waypoints) is evaluated before we actually reach
(WP_2)
which is
somewhat counter-intuitive when looking at the program sequence. If a waypoint is a stop point
and followed by conditional expressions to determine the next waypoint (e.g. the I/O command) it
is executed when the robot arm has stopped at the waypoint.
MoveL
WP_I
WP_1 (blend)
WP_2 (blend)
if (digital_input[1]) then
WP_F_1
else
WP_F_2
WP_I
WP_1
WP_2
WP_F_1
WP_F_2
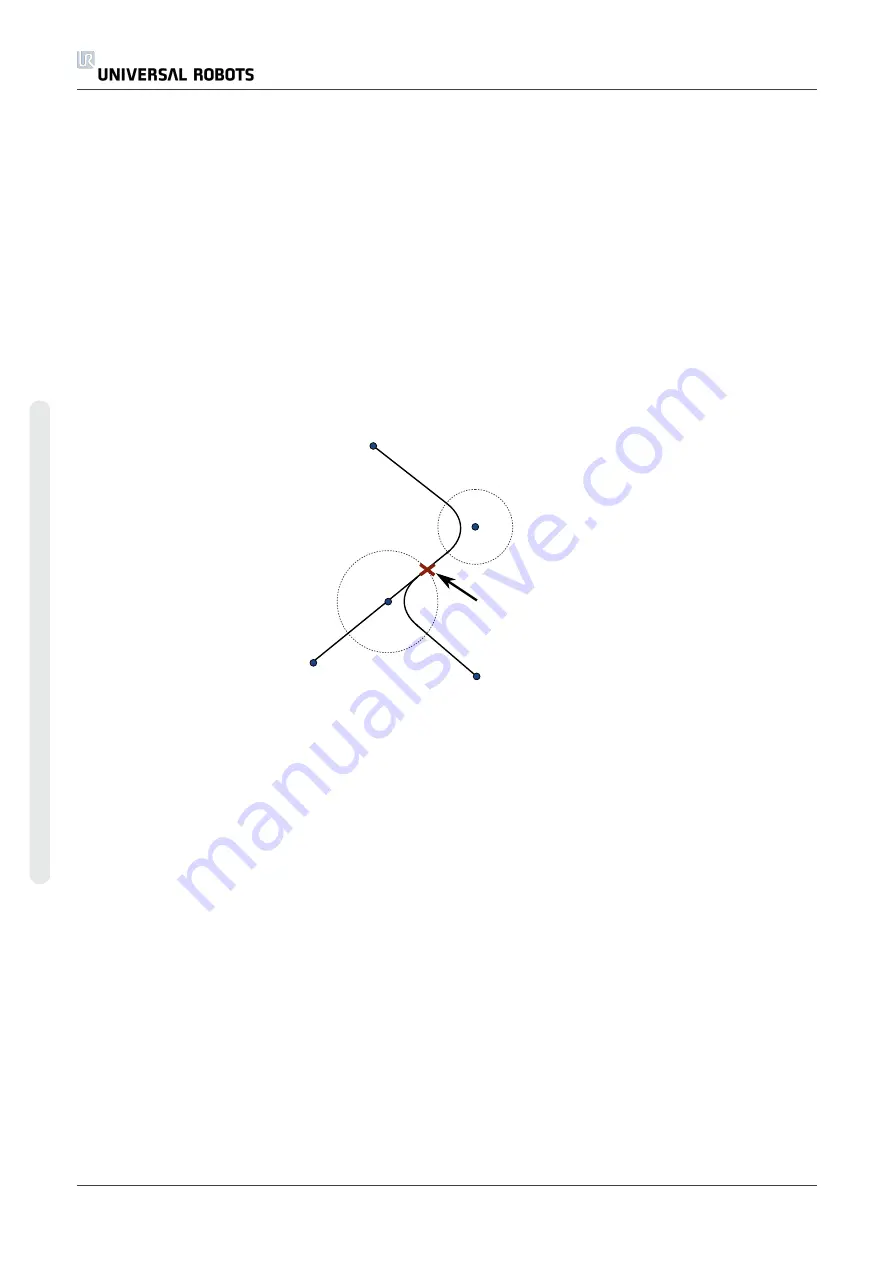
*
16.5:
WP_I
is the initial waypoint and there are two potential final waypoints
WP_F_1
and
WP_
F_2
, depending on a conditional expression. The conditional
if
expression is evaluated when
the robot arm enters the second blend (*).
Trajectory type combinations
It is possible to blend between all four combinations of trajectory types of
MoveJ
and
MoveL
, but
the specific combination will affect the computed blend trajectory. There are 4 possible
combinations:
1.
MoveJ
to
MoveJ
(Pure Joint space blend)
2.
MoveJ
to
MoveL
3.
MoveL
to
MoveL
(Pure Cartesian space blend)
4.
MoveL
to
MoveJ
Pure joint space blending (bullet 1) vs. pure Cartesian space blending (bullet 3) is compared in
figure
. It shows two potential paths of the tool for identical sets of waypoints.
UR10
168
User Manual
C
o
p
yr
ig
h
t
©
2
0
0
9
–
2
0
2
0
b
y
U
n
iv
e
rs
a
l
R
o
b
o
ts
A
/S
.
A
ll
ri
g
h
ts
re
s
e
rv
e
d
.
Summary of Contents for UR10/CB3
Page 1: ...Universal Robots User Manual UR10 CB3 Original instructions en...
Page 28: ...UR10 20 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 30: ...UR10 22 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 36: ...UR10 28 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 56: ...UR10 48 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 62: ...UR10 54 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 64: ...UR10 56 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 72: ...China RoHS UR10 64 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 73: ...KCC Safety User Manual 65 UR10 Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 92: ...UR10 84 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 116: ...UR10 108 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 124: ...UR10 116 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 164: ...UR10 156 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 214: ...UR10 206 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...




































































