





























182
• VACON®
apfiff09 marine
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
7.7 DC current and magnetization handling
The DC brake can be used to hold the motor in place (nominal torque at nominal slip). It can be also
used to keep the motor warm in places with high humidity and to speed up the generation of rotor
flux. Rotor flux is needed in the induction motor to generate torque. The current that is needed to
make the nominal flux is defined by the magnetization current parameter but, depending on motor
size, nominal flux takes a different time to produce after start command.
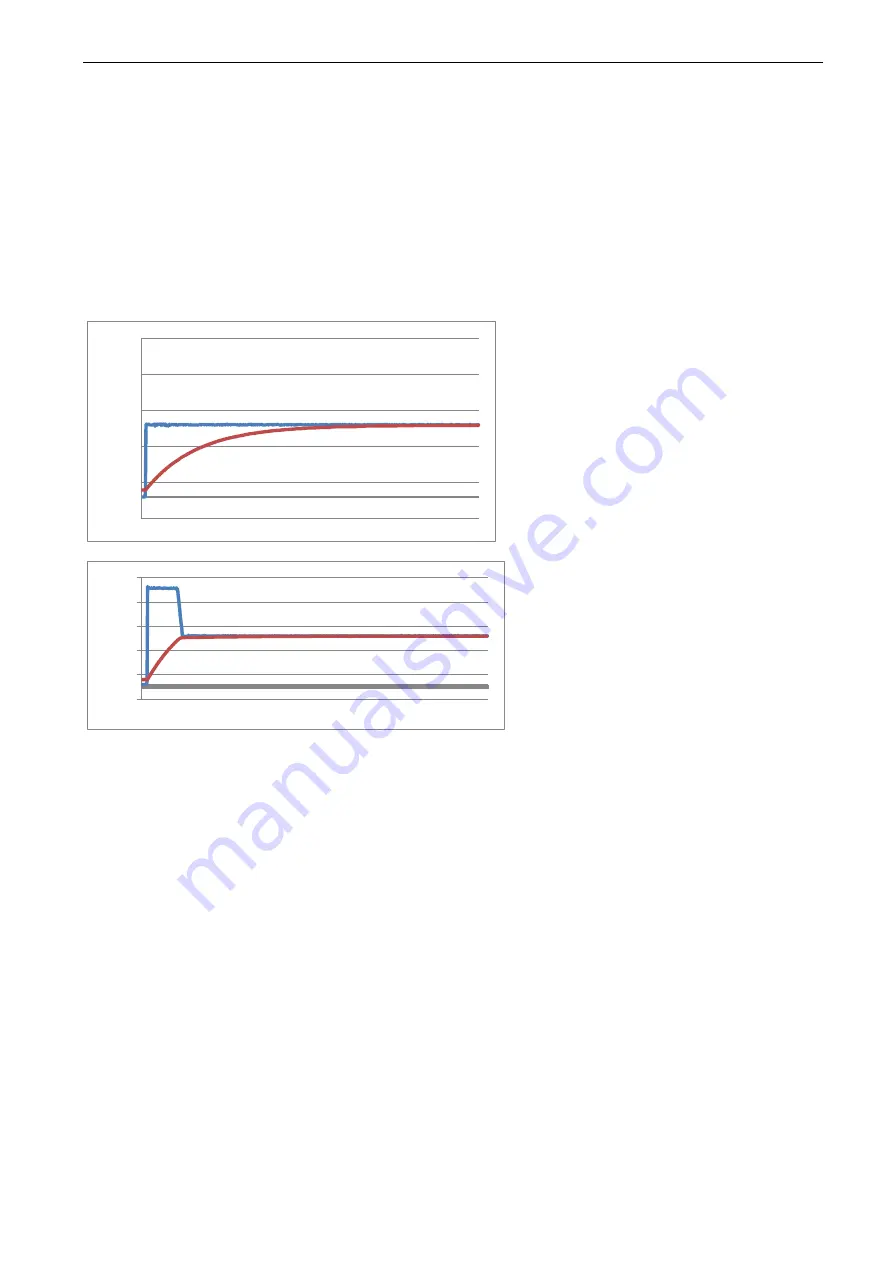
Giving a higher current on start to the motor will decrease the time when the motor is able to
generate nominal torque.
Blue: Motor Current. Red: Rotor Flux.
7.7.1 Open loop settings
P2.7.1.1
DC-braking current
ID627
“DC
-
Brake Current”
Defines the current injected into the motor during DC-braking. On start, this parameter is
used together with DC Brake time to decrease the time when motor is able to produce
nominal torque. When DC brake current is applied to the motor the output frequency is
zero.
P2.7.1.2
DC-braking time at start
ID507
“Start
DC-
BrakeTm”
DC-brake is activated when the start command is given. This parameter defines for how
long the DC current is given to the motor before acceleration starts. DC brake current at
start is used in order to magnetize the motor before running, which will improve the
torque performance at start. Needed time depends on motor size, value varying between
100 ms to 3 second. The bigger the motor the more time is needed.
The default setting 0.00 s means that 200 ms is spent to magnetize motor. This 200 ms
can be set to zero with
parameter “MakeFluxTime”
.
Activating flying start will disable the DC brake functions at start.
-300
200
700
1200
1700
2200
0.0
1
0.4
0.7
9
1.1
8
1.5
7
1.9
6
2.3
5
2.7
4
3.1
3
3.5
2
3.9
1
4.3
4.6
9
5.0
8
5.4
7
5.8
6
6.2
5
6.6
4
-300
200
700
1200
1700
2200
0.0
1
0.4
0.7
9
1.1
8
1.5
7
1.9
6
2.3
5
2.7
4
3.1
3
3.5
2
3.9
1
4.3
4.6
9
5.0
8
5.4
7
5.8
6
6.2
5
6.6
4
Summary of Contents for apfiff09 marine
Page 1: ...vacon nx ac drives apfiff09 marine application manual ...
Page 2: ......
Page 310: ......







































































