




Valve Mounting
Cheminert valves
With the valve and actuator in Position 1, engage the drive pin of the valve with the coupling of the
actuator. Rotate the valve by hand until the pin on the actuator clamp ring lines up with the hole in the
face of the valve. Push the valve on all the way and tighten the clamp ring screw.
Serial Communication Protocol
Serial communication with the multiposition actuator is based on an ASCII string protocol. Carriage
return (OD hex) characters parse the communications by defining the end of each command. Line
feed characters (OA hex) are ignored.
The hardware interface utilizes only ground, transmit, and receive signals, on connector J3 pins 1, 2,
and 3, respectively. Software flow control (Xon/Xoff) is not supported. The baud rate is set at 9600
baud, no parity, 8 data bits, 1 stop bit. The serial port output (transmit line) of the actuator is disabled
(high impedance) when not in use. With the software-settable device “ID” feature, up to 10 actuators
can be controlled from a single serial port by a host processor such as a personal computer.
Command set options include the ability to request position and direction in a single command, or to
allow the actuator to choose the shortest route to the selected position. Other options include requesting
the current position or firmware identification, changing the number of positions if a different valve is
installed, and setting or clearing the command preface “ID”.
The following is a description and explanation of each command:
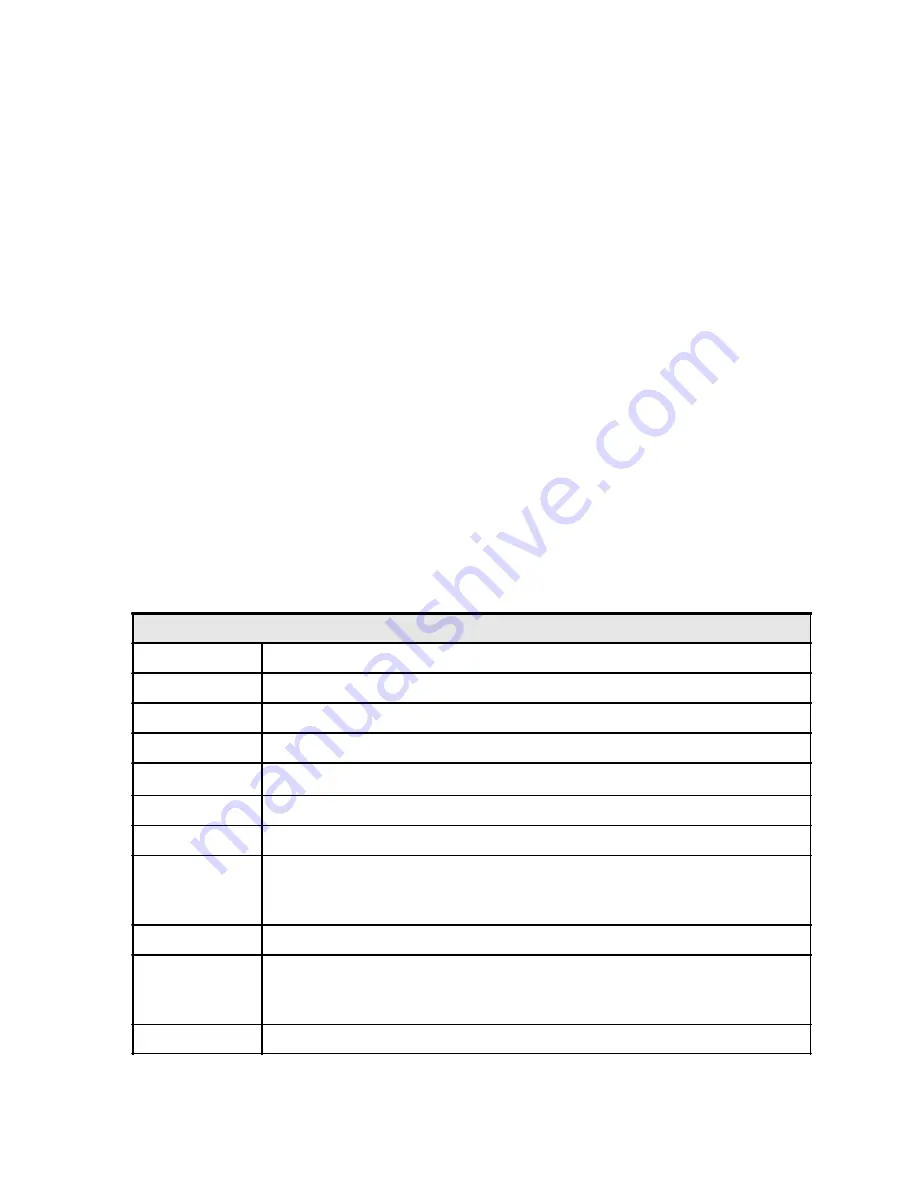
Serial Commands
NP
<enter>
Displays the number of positions the actuator is currently set to index
NP
=
nn<enter>
Sets the number of positions (
nn) for the current valve
CW
nn<enter>
Sends the actuator to position
nn (from 1 to NP) in a clockwise direction
CC
nn<enter>
Sends the actuator to position
nn (from 1 to NP) in a counterclockwise direction
GO
nn<enter>
Sends the actuator to position
nn (from 1 to NP
)
via the shortest route
CP
<enter>
Displays the current position
SD
<enter>
Displays the digital input status where 0 = enabled and 1 = disabled
SD
=
n
<enter>
Sets the digital input status to [0] enabled or [1] disabled
NOTE:
At power up, digital input status is set to [0] enabled. Setting the status to [1]
locks out communication through the manual controller and remote control cables.
ID
<enter>
Displays the current device ID setting
ID
=
n<enter>
Sets the device ID to value
n, from 0 to 9
NOTE:
when the ID feature is enabled, all commands to the device must be prefaced
by the ID. (Assigning an ID of *** disables this feature)
VR<
enter>
Displays the part number and date of the firmware







































































