






















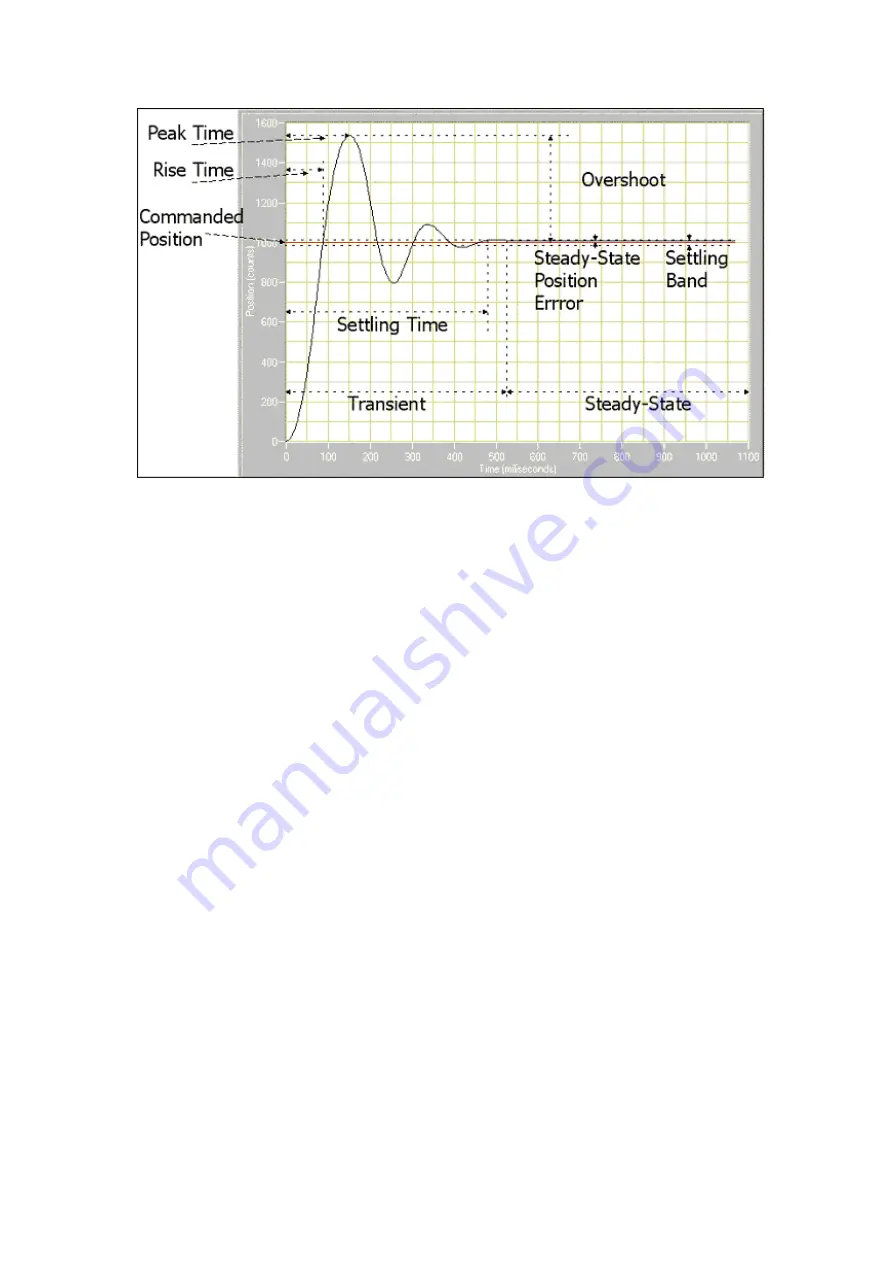
Settling Time—the time required by the response curve to reach and stay within a
range that is approximately the final value of size specified by the absolute percentage
of the final value (2% to 5%).
Rise Time—the time required by the response to rise from 10% to 90% of its final
value; the faster the response time of the system, the faster the rise time.
Peak Time—the time required for a response to reach the first peak of the overshoot.
Maximum Overshoot—the maximum peak value of the response curve measured
from the desired position. The maximum overshoot directly indicates the relative
stability of the system.
Commanded Position—the desired position (or rotation speed). In this case, the
commanded value is 1,000. For the Zeus motor controller this will be the value in Hz
for 33.33 rpm or 45 rpm.
Steady-State Position Error—the error that occurs when the system is at rest.
Settling Band—the area the position must be within in order to determine settling
time.
3.4.1
Analysing step response plots
This section provides definitions and sample diagrams of the six most common
response types.
An unstable system, shown below, produces an oscillatory, exponentially diverging
step response. This kind of system never settles down; in fact, the oscillations tend to
worsen over time.







































































