


















FRG-700 Inverted Magnetron Pirani Gauge
26
Appendix
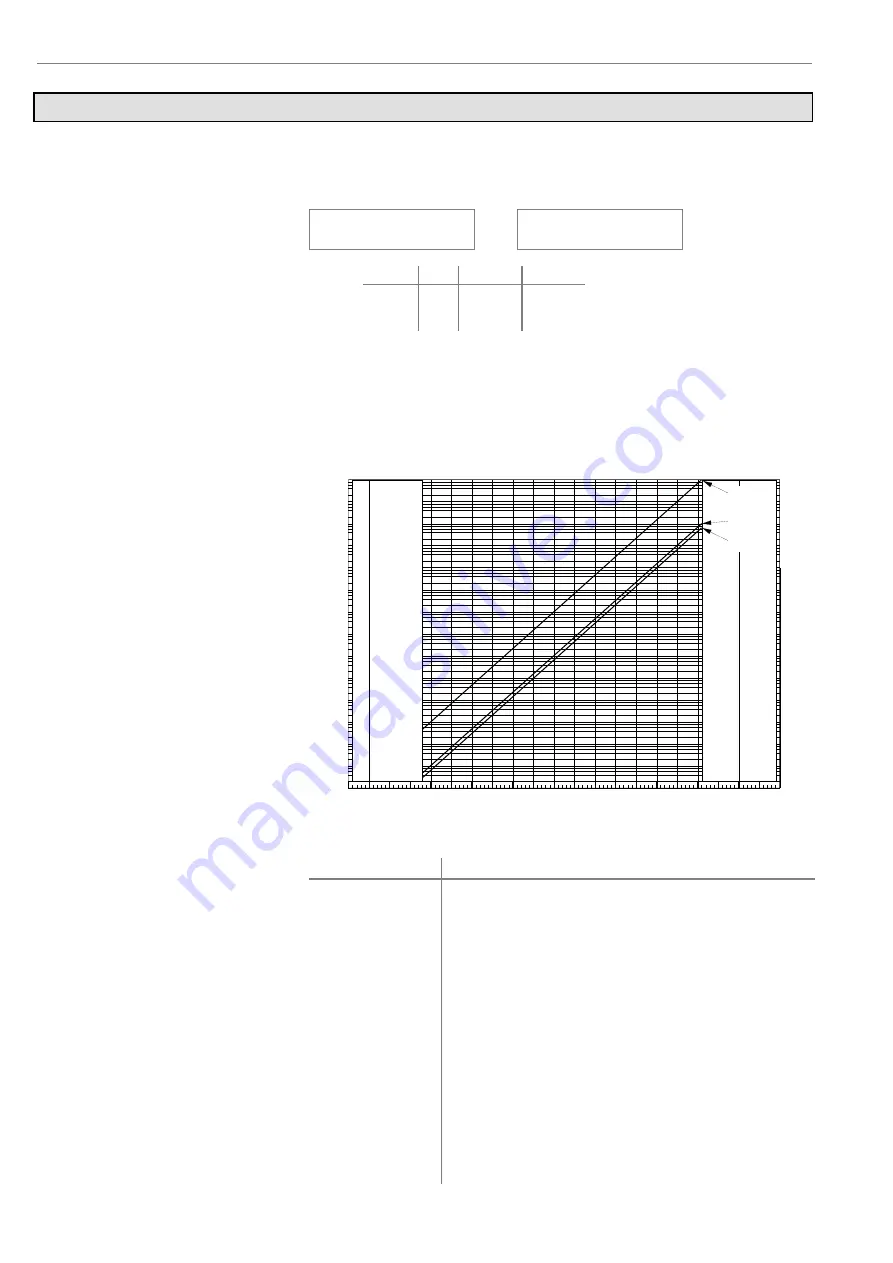
p = 10
1.667U-d
⇔
U = c + 0.6log
10
p
p U c
d
[mbar]
[Torr]
[Pa]
[V]
[V]
[V]
6.8
6.875
5.6
11.33
11.46
9.333
where p pressure
U measuring
signal
c, d constant (pressure
unit
dependent
valid in the range
5×10
-9
mbar < p
3.8×10
-9
Torr < p
5×10
-7
Pa < p
<1000 mbar
<750 Torr
<1×10
5
pa
1E+04
1E+02
1E+00
1E–02
1E–04
1E–06
1E–08
0.0 0.5
1.5
2.5
3.5
4.5
5.5
6.5
7.5
8.5
9.5
10.5
sen
sor
er
ror
un
der
ra
nge
sen
sor
er
ror
ove
rr
ang
e
Pa
mbar
torr
Measuring signal U
[
V
]
Pressure p
Meas. signal U [V] Pressure p [mbar]
Pressure p [Torr]
Pressure p [Pa]
<0.5 Sensor
error
0.5 … 1.82
Underrange
1.82
2.0
2.6
3.2
3.8
4.4
5.0
5.6
6.2
6.8
7.4
8.0
8.6
5.0×10
-9
1.0×10
-8
1.0×10
-7
1.0×10
-6
1.0×10
-5
1.0×10
-4
1.0×10
-3
1.0×10
-2
0.1
1.0
10
100
1000
3.8×10
-9
7.5×10
-9
7.5×10
-8
7.5×10
-7
7.5×10
-6
7.5×10
-5
7.5×10
-4
7.5×10
-3
7.5×10
-4
0.75
7.5
75
750
5.0×10
-7
1.0×10
-6
1.0×10
-5
1.0×10
-4
1.0×10
-3
1.0×10
-2
0.1
1.0
10
100
1000
1.0×10
4
1.0×10
5
8.6 … 9.5
Overrange
9.5 … 10.5
Sensor error (Pirani defective)
A:
Measuring Signal vs.
Pressure
Conversion formulae
Conversion curves
Conversion table







































































