





























INSTALLATION
Series 642
44/113
Edition 2017-11-24
605593EC
4.6.9.2
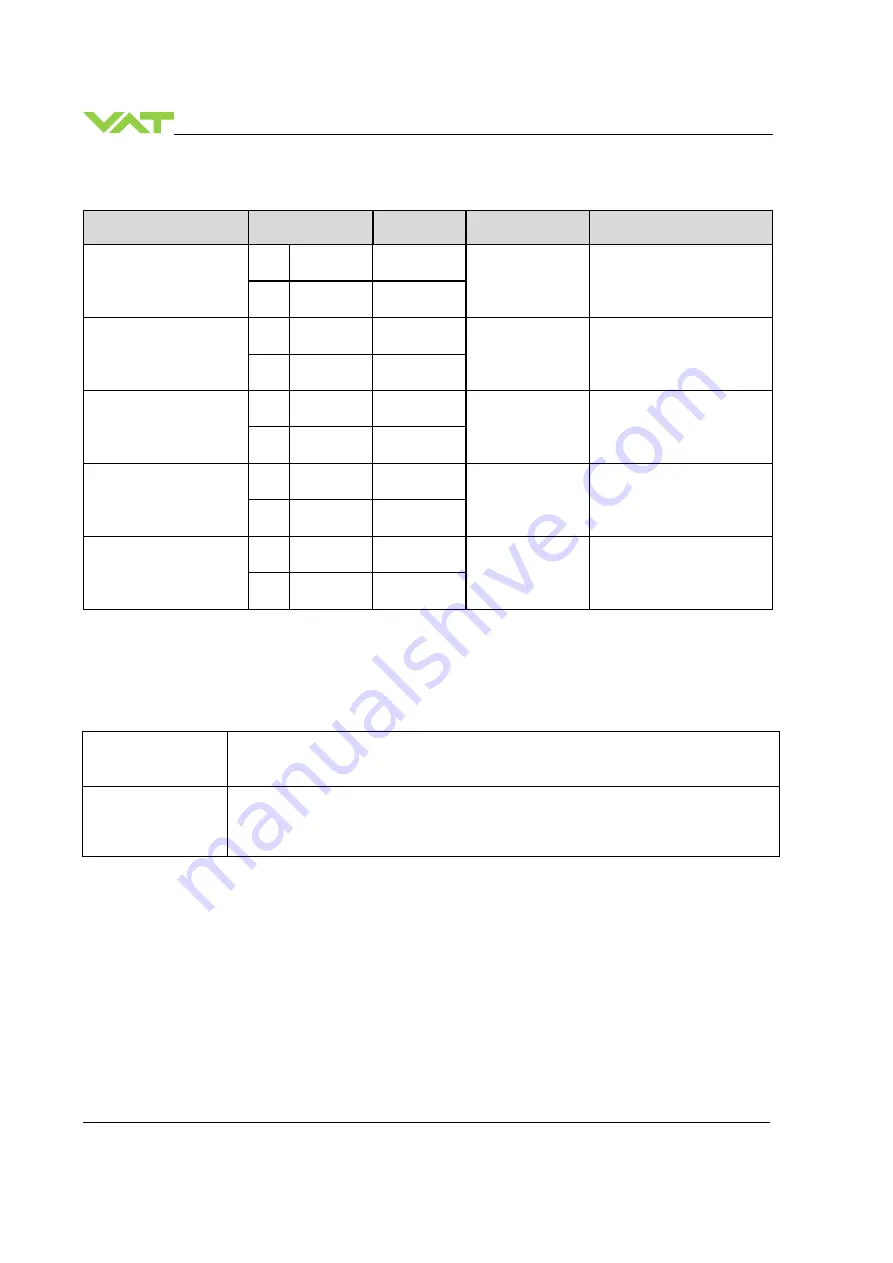
Fixed 1 control algorithm
Parameter
Command
Request
Data Type
Values
RAMP TIME
Set
s:02B01c
s:02
FLOAT
c = 0.00…1
’
000
’
000.0
Default is: 0.00
Get
i:02B01
i:02B01c
RAMP MODE
Set
s:02B02c
s:02
UINT
c = 0 or 1
0 = constant time
1 = constant slope
Default is: 0
Get
i:02B02
i:02B02c
CONTROL DIRECTION
Set
s:02B03c
s:02
UINT
c = 0 or 1
0 = downstream
1 = upstream
Default is: 0
Get
i:02B03
i:02B03c
P-GAIN
Set
s:02B04c
s:02
FLOAT
c = 0.001…100
Default is: 0.1
Get
i:02B04
i:02B04c
I-GAIN
Set
s:02B05c
s:02
FLOAT
c = 0…100.0
Default is: 0.1
Get
i:02B05
i:02B05c
Explanation:
RAMP TIME
Pressure setpoint ramp time [s]
RAMP MODE
Mode = 0
Constant Time
The RAMP TIME is dependent on the adjusted parameter ramp time and is always the
same independent of the control deviation. That means the ramp time from the actual value
to the setpoint value is the adjusted parameter ramp time value.
Mode = 1
Constant Slope
The RAMP TIME is dependent on the adjusted parameter ramp time and is different
depending on the control deviation. The RAMP TIME is calculated corresponding to the
sensor full scale value (10V). Ramp time = 10 sec.; ramp time slope is SFS (10V) in 10
Seconds.
CONTROL DIRECTION
The CONTROL DIRECTION defines the type of application, if the valve is mounted in downstream or upstream.
Downstream means the valve is after the chamber and before the pump. Upstream, valve is mounted before chamber
and pump.
P-GAIN / I-GAIN
The P-GAIN is the proportional factor of the fixed control algorithm. The I-GAIN is the integral factor.







































































