





















TCI-W13-U, TCI-W23-U Universal Controller
I
NPUT
C
ONFIGURATION
Doc: 70-00-0414C, V2.0, 20220523
© Vector Controls GmbH, Switzerland
Page 11-22
Subject to alteration
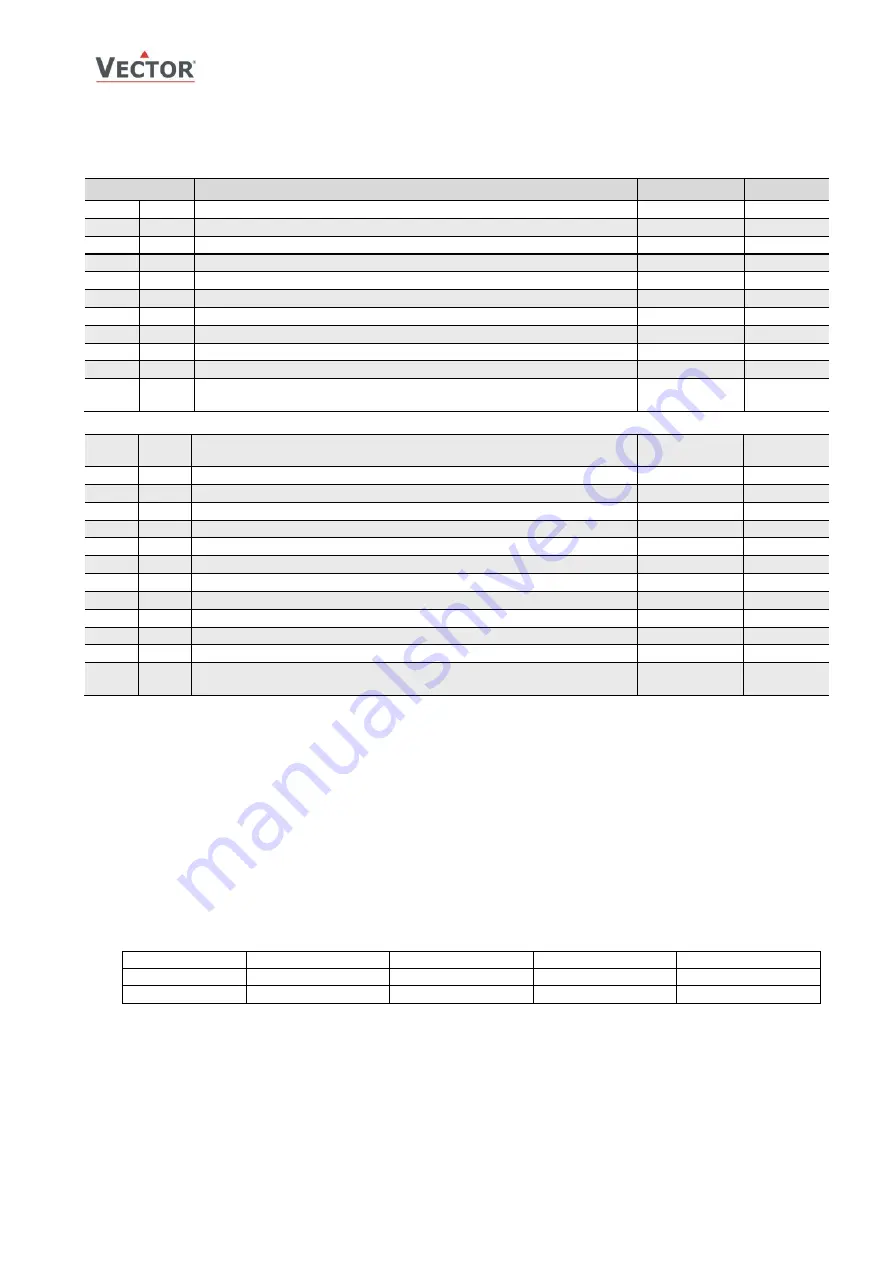
Control configuration (Password 241)
Input configuration
Internal inputs 1T temperature and 1H humidity (with added AES3-HT-A2, -A3 or -A5 element)
Parameter
Description
Range
Default
1T 00
1H 00 Enable internal sensor
OFF/ON
ON
1T 01
1H 01 Display minimum value
-50
–
205
0
1T 02
1H 02 Display maximum value
-50
–
205
100
1T 03
1H 03 Sensor sampling rate (control speed decrease as rate increases)
0
–
100
10
1T 04
1H 04 Sensor calibration
per input
0
1T 05
1H 05 Alarm 1 (1T), Alarm 3 (1H) low limit
OFF/ON
OFF
1T 06
1H 06 Alarm 1 ((1T), Alarm 3 (1H) low limit values
-40
–
215°C
5°C/5%
1T 07
1H 07 Alarm 2 (1T), Alarm 4 (1H) high limit
OFF/ON
OFF
1T 08
1H 08 Alarm 2 (1T), Alarm 4 (1H) high limit values
-40
–
215°C
50°C / 95%
1T 09
1H 09 Hysteresis Alarm 1, 2 (1T), 3, 4 (1H)
0
–
100°
5°C/5%
1T 10
1H 10 Calculate a range of inputs (0= not active):
1= average, 2= minimum, 3= maximum, 4= differential
0
–
3
0
Universal inputs 1U = UI1, external passive input 2T = TI2 (TCI-W23-U only)
1U 00 2T 00 Signal type (0= not active):
1= 0-10V or 0-20mA, 2= 2-10V or 4-20mA, 3= passive temperature
0
–
3
1
1U 01 2T 01 Display minimum value
-50
–
205
0
1U 02 2T 02 Display maximum value
-50
–
205
100
1U 03 2T 03 Analog input display range: 0= x 0.1, 1= x 1, 2= x 10, 3 = x 100
0
–
3
1
1U 04 2T 04 Analog input unit of measure: 0= no unit, 1= %, 2= °C /°F, 3= Pa
0
–
3
2
1U 05 2T 05 Sensor sampling rate (control speed decrease as rate increases)
0
–
100
10
1U 06 2T 06 Sensor calibration
Per input
0
1U 07 2T 07 Alarm 5 (1U), Alarm 7 (2T) low limit
OFF/ON
OFF
1U 08 2T 08 Alarm 5 (1U), Alarm 7 (2T) low limit value
-40
–
215°C
5°C(41°F)
1U 09 2T 09 Alarm 6 (1U), Alarm 8 (2T) high limit
OFF/ON
OFF
1U 10 2T 10 Alarm 6 (1U), Alarm 8 (2T) high limit value
-40
–
215°C
50°C(122°F)
1U 11 2T 11 Hysteresis alarm 5 and 6 (1U), Alarm 7 and 8 (2T)
0
–
100°
5°C(10°F)
1U 12 2T 12 Calculate a range of inputs (0=not active):
1= average, 2= minimum, 3= maximum, 4= differential
0
–
4
0
➔
Set jumpers on the back of the controller: 0
–
10VDC (default), 0
–
20mA, or RT/DI (passive temperature or binary)
➔
Further define analog inputs with U00
➔
Match sensor range to input display. With a differential pressure transmitter having 0
–
200 Pa measuring range set
UO1 display minimum to 0 and U02 display maximum to 200. The allowable range value of -50
–
205 may be adjusted
with multipliers inU03. The largest displayable values are -990
–
9999. Limiting range increases resolution. Applies to
analog as well as passive temperature inputs.
➔
For binary input (open/close contact) set the jumper to RT/DI and parameter U00 to an analog input. An open
contact reads as a high value (100%), a closed contact as a low value (0%).
➔
Enable / Disable an alarm. Setting the alarm enable to OFF will prevent the alarm from being displayed on screen. It
may never the less be used to control an output by setting the appropriate output alarm flags. This way, an alarm
limit may be used as interlock.
➔
Specify the input value that triggers an alarm. Hysteresis is the difference between alarm level input and value
required to turn the alarm off. An alarm is displayed as text if enabled (see table). Alarm text can be set to blink
continuously until acknowledged by pressing the OPTION button or only while the alarm conditions are active (see
user parameter UP15).
➔
Calculate mathematical functions over multiple inputs for loop control or display with xU12. In order to calculate
average, minimum or maximum between several inputs, make sure all the inputs are of identical type and range and
then activate the same function on xU12 on all the selected inputs. The largest input of the group selected will carry
the calculated value. For example: When average is activated on 2T12 and 1U12 = 1, the average is carried on UI2.
UI2 may now be used as input for control loops and it will show the average value of UI1 and TI2 combined. It is
possible to use different functions on different inputs. For example: minimum of UI1 and UI3 and maximum of UI2
and UI4.
➔
The differential function may only be calculated on subsequent inputs. Such as TI2-UI1. The function must only be
activated on the minuend (TI2 in this example). The displayed value of the minuend will change into the difference:
TI2 in
–
UI1 = TI2 out. It is possible to have multiple differentials on one controller. It is not possible to reverse the
subtraction to UI1-TI2.
Input
1T
1H
1U
2T
Low limit
ALA1
ALA3
ALA5
ALA7
High limit
ALA2
ALA4
ALA6
ALA8







































































