HDL-64E S3
High Definition LiDAR Sensor
Page 37
Velodyne LiDAR, Inc.
©
2019
63-HDL64ES3 REV K
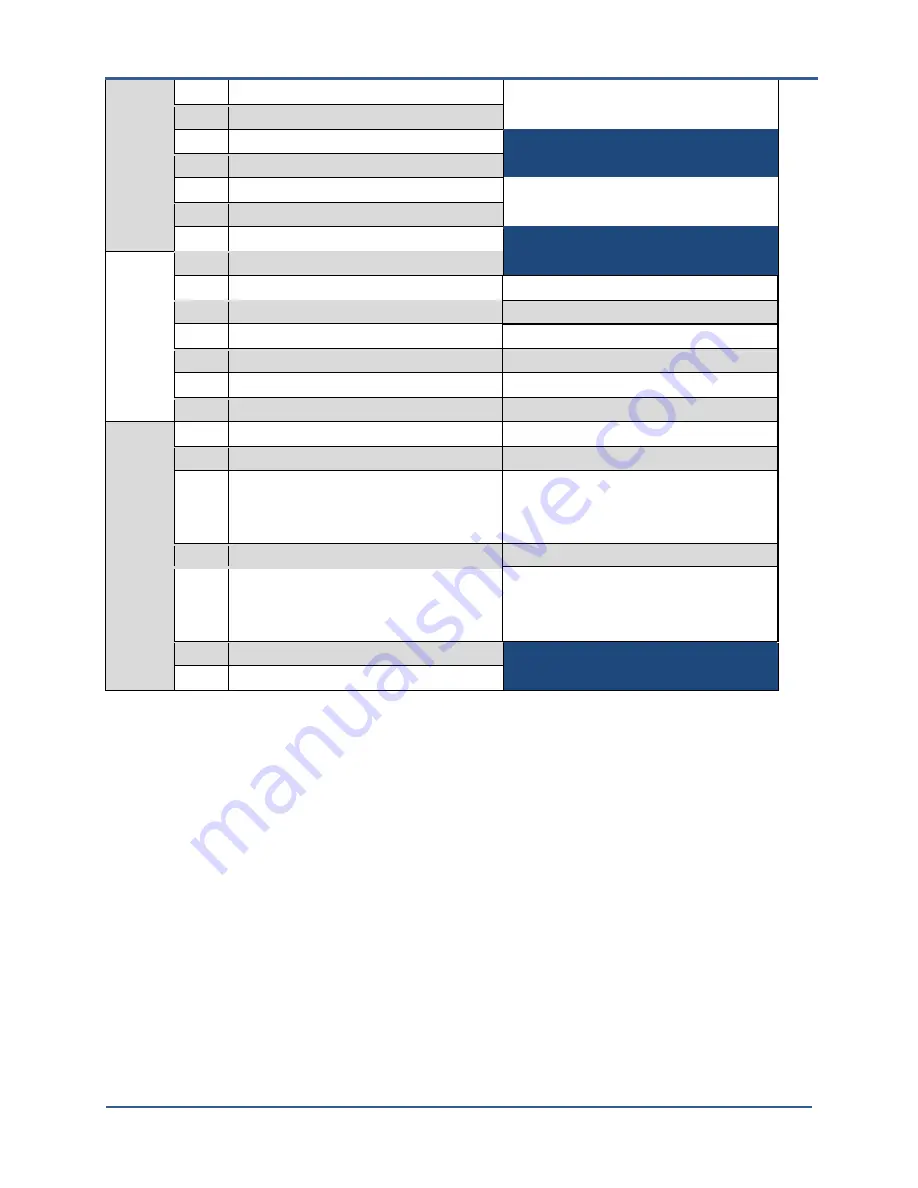
Cyc
le
2
58
FE
Motor Speed Low Byte
2 Byte Signed Integer (RPM)
FF
Motor Speed High Byte
FC
FOV Start Angle Low Byte
2 Byte Integer
÷
100 to Scale
FD
FOV Start Angle High Byte
FA
FOVE End Angle Low Byte
2 Byte Integer
÷
100 to Scale
FB
FOV End Angle High Byte
7
Real Life Time Low Byte
2 Byte Integer (Hour)
Cyc
le
2
59
1
Real Life Time High Byte
2
IP Source 1
12 Digit String
3
IP Source 2
12 Digit String
4
IP Source 3
12 Digit String
5
IP Source 4
12 Digit String
6
IP Destination 1
12 Digit String
7
IP Destination 2
12 Digit String
Cyc
le
2
60
1
IP Destination 3
12 Digit String
2
IP Destination 4
12 Digit String
F9
Multiple Return Status
0 = Strongest
1 = Last
2 = Both
4
Reserved
N/A
F8
Power Level Status
A8
A0
n8 (n from 0 to 7)
6
Calibration Data CRC Checksum Low Byte
2 Byte unsigned Integer
7
Calibration Data CRC Checksum High Byte
Summary of Contents for HDL-64E S3
Page 1: ...USER S MANUAL AND PROGRAMMING GUIDE HDL 64E S3 High Definition LiDAR Sensor ...
Page 40: ...HDL 64E S3 High Definition LiDAR Sensor Page 40 Velodyne LiDAR Inc 2019 63 HDL64ES3 REV K ...
Page 41: ...HDL 64E S3 High Definition LiDAR Sensor Page 41 Velodyne LiDAR Inc 2019 63 HDL64ES3 REV K ...
Page 42: ...HDL 64E S3 High Definition LiDAR Sensor Page 42 Velodyne LiDAR Inc 2019 63 HDL64ES3 REV K ...