


















HDL-64E S3
High Definition LiDAR Sensor
Page 50
Velodyne LiDAR, Inc.
©
2019
63-HDL64ES3 REV K
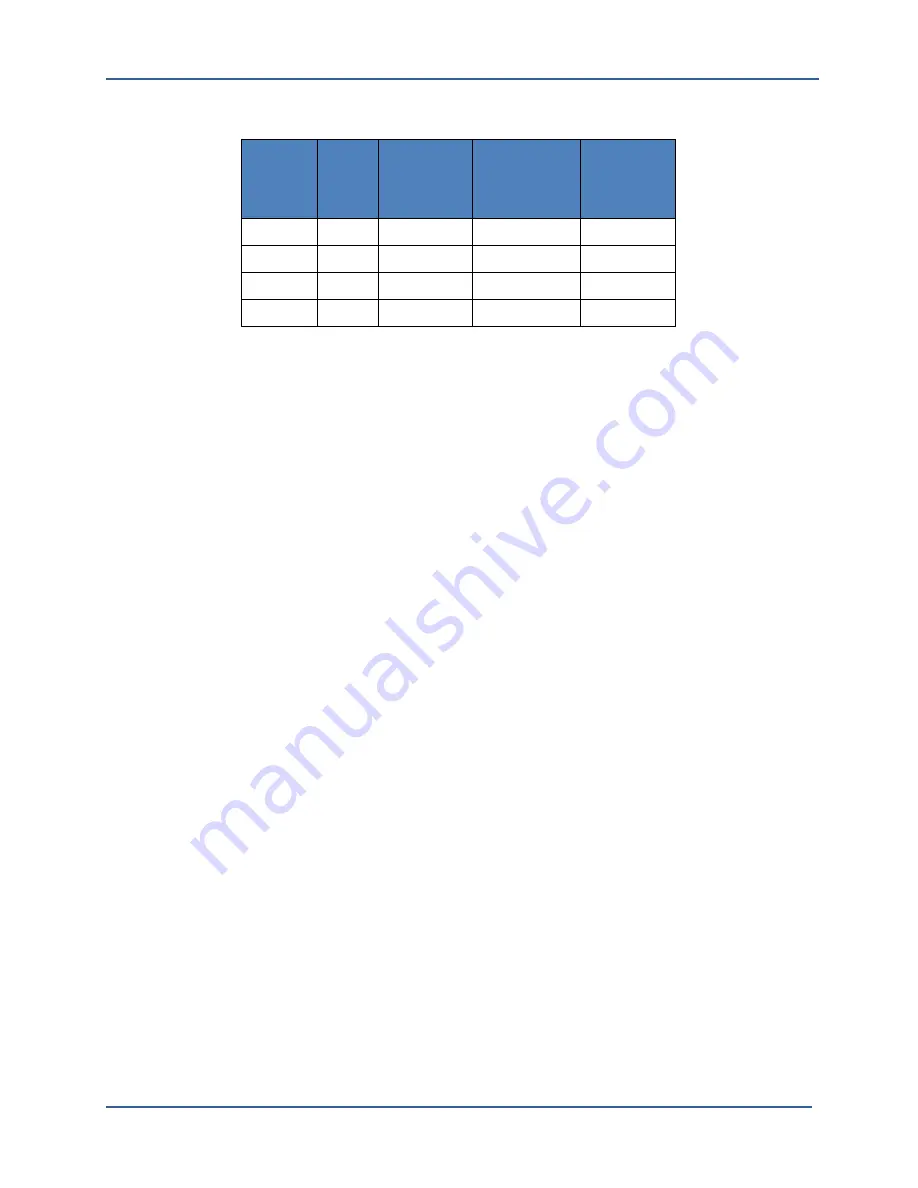
Appendix I: Angular Resolution
RPM
RPS
(Hz)
Total Laser
Points per
Revolution
Points Per
Laser per
Revolution
Angular
Resolution
(degrees)
0300
5
266,627
4167
0.0864
0600
10
133,333
2083
0.1728
0900
15
88,889
1389
0.2592
1200
20
66,657
1042
0.3456
Summary of Contents for HDL-64E S3
Page 1: ...USER S MANUAL AND PROGRAMMING GUIDE HDL 64E S3 High Definition LiDAR Sensor ...
Page 40: ...HDL 64E S3 High Definition LiDAR Sensor Page 40 Velodyne LiDAR Inc 2019 63 HDL64ES3 REV K ...
Page 41: ...HDL 64E S3 High Definition LiDAR Sensor Page 41 Velodyne LiDAR Inc 2019 63 HDL64ES3 REV K ...
Page 42: ...HDL 64E S3 High Definition LiDAR Sensor Page 42 Velodyne LiDAR Inc 2019 63 HDL64ES3 REV K ...







































































