





























SLAM is a technique used by robots to analyze and navigate their environment. SLAM software automatically identifies sta-
tionary objects in the LiDAR data. The algorithm then uses the location of the stationary objects to mathematically back-out
the movement of the LiDAR and translate the data into a single coordinate system.
Most Velodyne LiDAR customers develop their own geo-referencing systems. However, inertial referencing and SLAM
solutions are available through third parties, and many can be found on the system integrators page at:
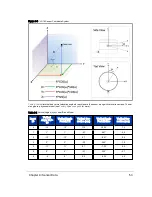
Chapter 9 • Sensor Data
67







































































