





























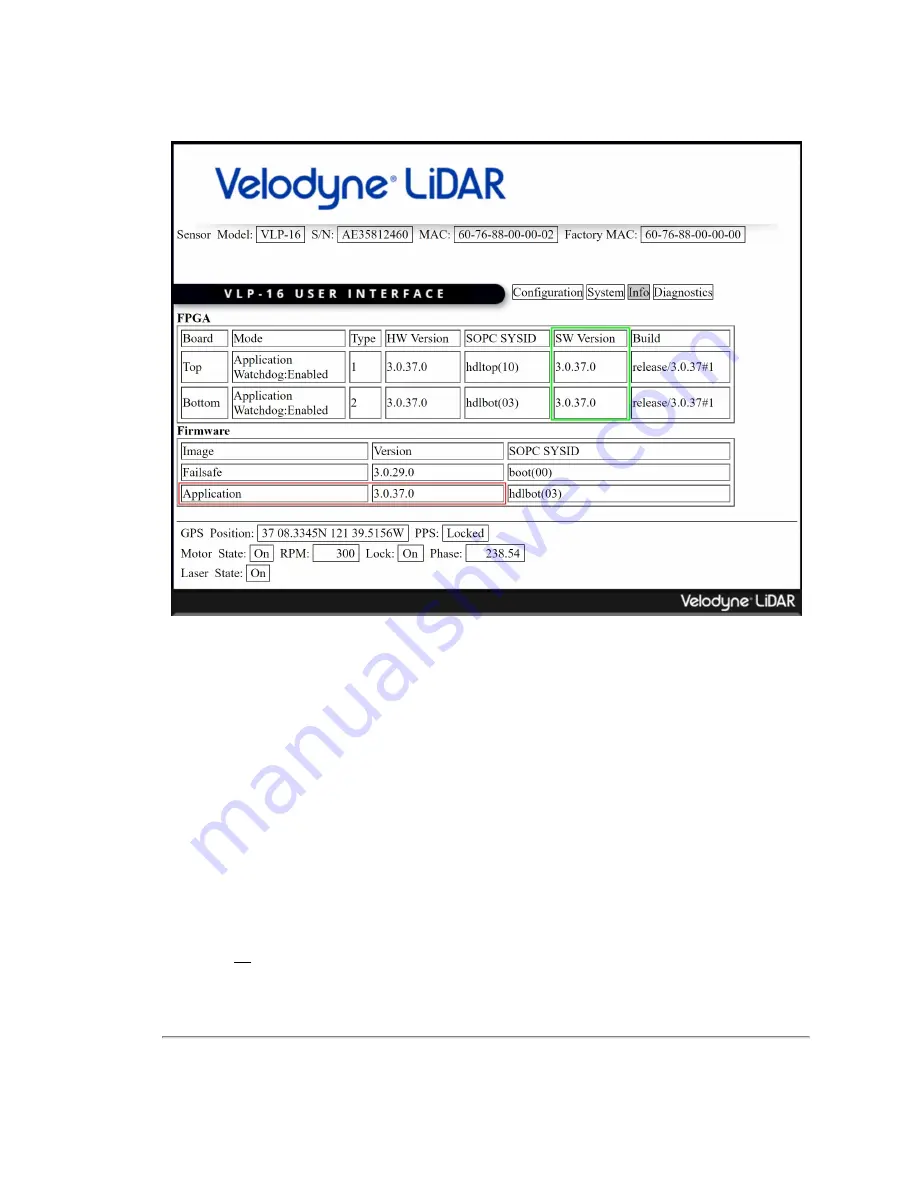
Figure B-7 Verify Firmware Versions
20. Verify that the Firmware Application Version (red box) matches the version of the firmware downloaded and
installed. Also verify that the same version appears in the SW Version column for both the Top and Bottom
boards (green box). If everything matches, the procedure completed successfully.
Any mismatches indicate an error occurred in the last stage of the update. (Occasionally, the screen may indicate
that “Firmware Update Processing is not available in Failsafe mode.” In Failsafe mode, the lasers and motor are dis-
abled.) Perform the
If An Error Occurs on the facing page
procedure below to resolve the issue.
B.1.1 Special Procedure to Update Firmware
The firmware update process requires both the top and bottom boards be flashed. A minor tweak is made to the steps nor-
mally used to update both boards. When this tweak is made, the normal procedure becomes the “Special Procedure to
Update Firmware.”
1. First, go to the System tab.
2. Click on Choose File and specify the flash file name.
3. Press Update to update the bottom board.
4. Wait a bit.
5. You will eventually see another screen entitled, “Firmware Upload Complete.”
6. Do not press the Process Firmware Update button to flash the top board.
*This is where the process deviates
98
VLP-16 User Manual







































































