





















EUROBLOC
SERVICE MANUAL FOR HOIST
86/212
This document and the information contained herein, is the exclusive property of Verlinde S.A.S. and represents a non-public, confidential and proprietary trade secret that
may not be reproduced, disclosed to third parties, altered or otherwise employed in any manner whatsoever without the express written consent of Verlinde S.A.S.
Copyright © (2013) Verlinde S.A.S. All rights reserved.
06/2015
7.1.6.2 Hoisting motor supplied with encoder
The encoder is a precision device coupled to the hoist motor shaft. It measures the rotation speed of the hoist
motor. Encoders are required in the motors of type S that are controlled by the frequency converters in a closed
loop. When a hoist motor is operated, the coupled encoder normally outputs 600 square wave pulses per
revolution.
The pulses are measured by the frequency converter and are monitored for:
load overspeed in the down direction
speed difference where the actual speed of the motor is compared to the frequency supplied to the motor
no pulses, indicating a stall situation.
In overspeed, speed difference or stall situations, the mechanical brake is closed immediately and power to the
motor is switched off.
Note that the encoders are not used with hoisting motors of type A which have a built-in bearing sensor to create
pulses for the frequency converter to detect overspeed.
You need to disassemble the encoder from the motor/extension shaft, for example, when servicing a motor brake.
A faulty encoder must always be replaced with new one.
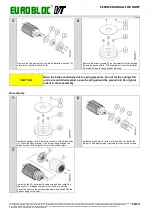
CAUTION
Closed loop speed control is very sensitive to encoder pulse defects. Faulty
encoder connections and disturbance in encoder pulses may cause wrong
operation or frequency converter faults.
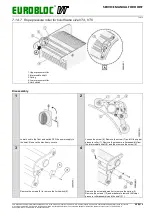
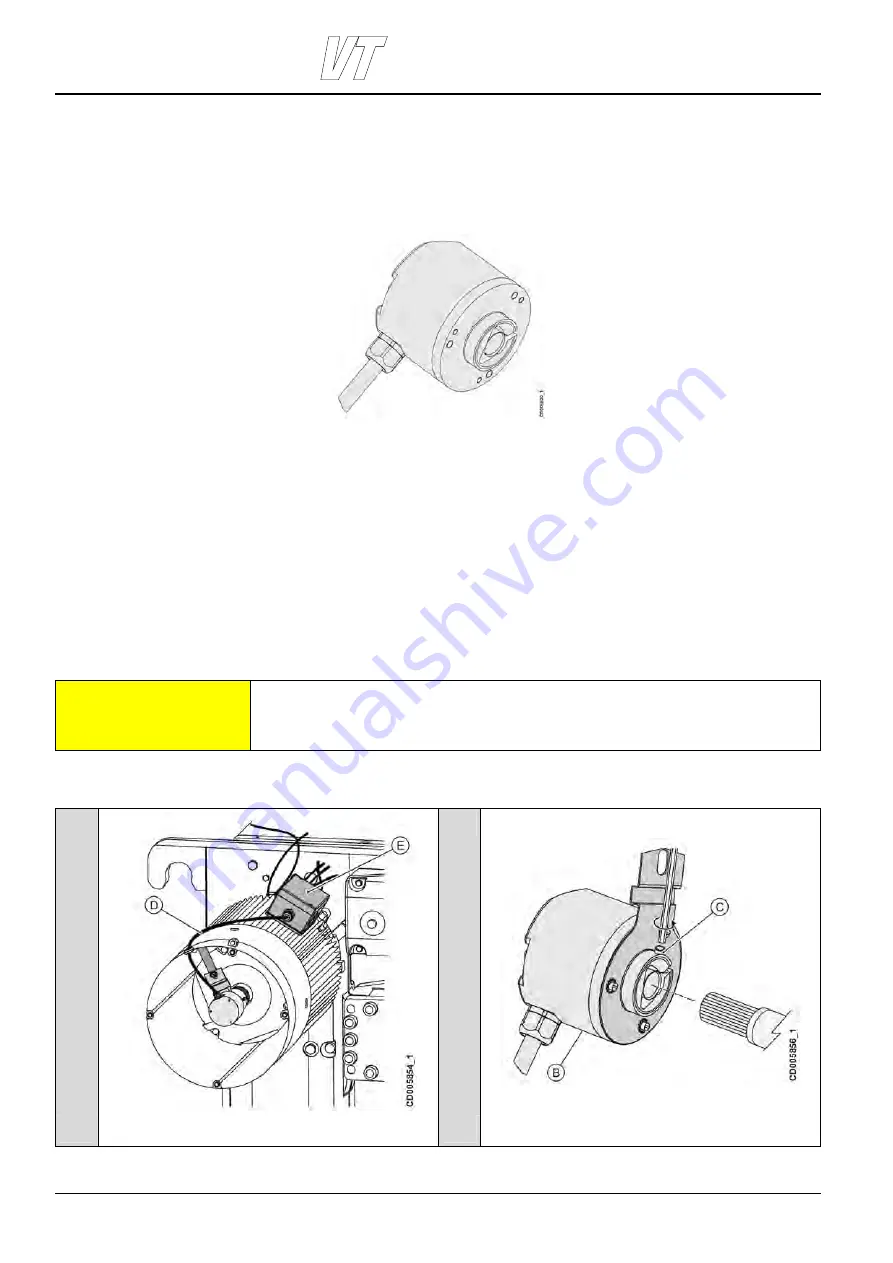
Disassembly
1a
2
Disassemble the connections inside the encoder terminal box
(E) and uninstall the encoder cable (D) from the box.
Release the encoder collar screws (C) and pull out the
encoder from the motor/extension shaft.






















































