






















21
246.805.201
Date: 2017-09-26
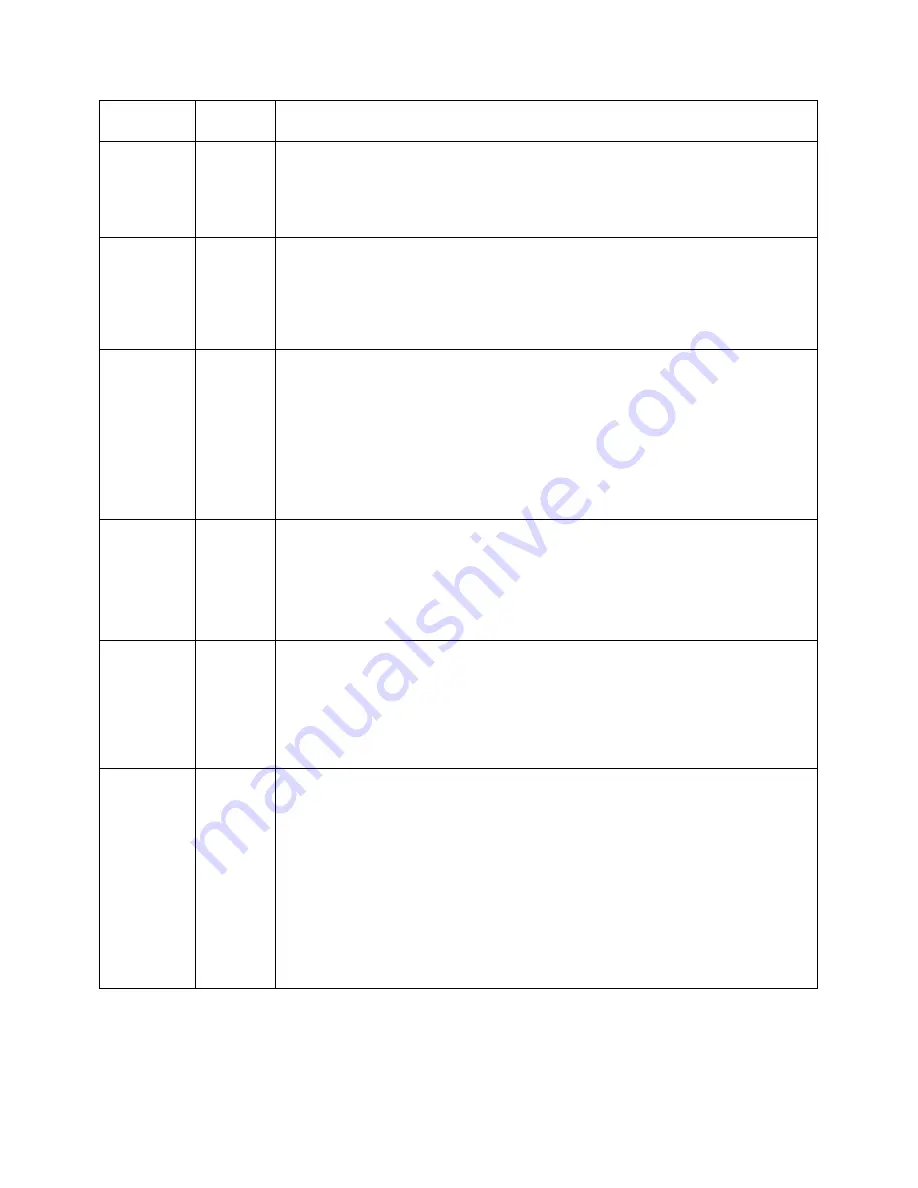
DMX
channel
Function Description
1
Position
rough
This channel controls the position of the winch, with the speed (DMX channel 3).
This rough position works together with the fine position (DMX channel 2).
The rough position and the fine position are multiplied in to a 16 bit channel. The
rough position is the MSB.
2
Position
fine
This channel controls the position of the winch, with the speed set on DMX
channel 3.
This fine position works together with the rough position (DMX channel 1).
The fine position and the rough position are multiplied in to a 16 bit channel. The
fine position is the LSB.
3
Speed
This channel controls the speed and defines the max lifting/lowering speed of the
winch.
The winch runs with the set max speed, but slows down as closing in on the
wanted position.
This channel also works as a main brake; the motor does not run unless the
channel is set above 0%.
The speed-channel can also be used to make soft and slow movements or fast and
sudden movements.
4
Motor
enable
Channel 4 is used as an extra security channel. The value on channel 4 needs to be
between 50 and 55 %, for the motor to run.
All other values make the motor stop.
All other values will also reset any error shown.
All other values will save the current position before a power down.
5
Reset UP
There is a 3s delay on this channel to reduce risk of accidentally resetting the top
position.
Channel 5 is used to manually move the wire up. When channel 5 is set ≥ 10% the
winch will move up until it reaches the limit switch UP. 10 – 100% makes the
motor run up, at variable speed. (10% = low speed – 100% = full speed).
Setting DMX channel 5 to 0 resets the position.
6
Manual
DOWN
There is a 3s delay on this channel to reduce risk of accidentally setting a new
range.
Channel 6 is used to manually move the wire down. When channel 6 is set ≥ 10%
the winch will move down, until it reaches the DOWN limit switch. 10 – 100%
makes the motor run down, at variable speed. (10% = low speed – 100% = full
speed).
The position is reset and a new TAC RANGE is calculated. The new range is the
tacho pulses, between top position set by channel 5 and bottom position set by
channel 6.
The winch should be reset to the top position with channel 5 before the range is
set with channel 6.
Summary of Contents for Winch 50 Double
Page 12: ...12 246 805 201 Date 2017 09 26...







































































