




















Watson Industries, Inc.
SPS-P230 Rev A 10/17/2017
6
0.01
0.1
1
10
100
1000
1
10
100
1000
10000
Seconds
E
rr
o
r
(D
e
g
re
e
s
)
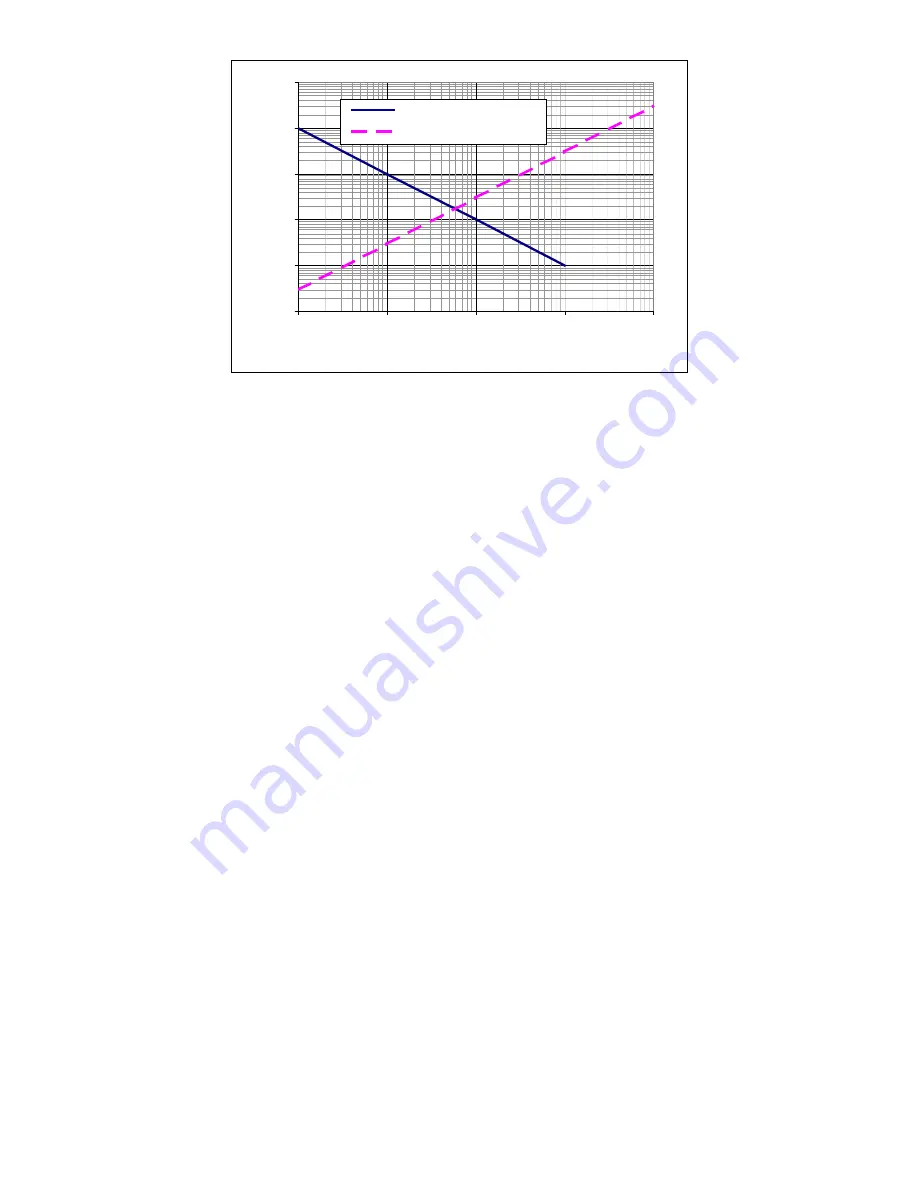
Dynamic Disturbances
Sensor Drift
Figure 2 Errors versus Time Constant
The correction time constant for this system is adjustable based on the conditions detected by the
system. When increasing errors are detected, the time constant is made longer so that the gyros are
in more control of the angles. This is done on the assumption that short-term errors are more likely
to be caused by vehicle dynamics.
The dynamics of aircraft, ships, or land vehicles all have individual patterns and intensities.
Sometimes, only experience will expose the best time constant setting for the lowest error. This is
why the time constants are settable by the user through the RS-232 connection of the Joystick
Controller. Please consult with Watson Industries before altering the time constants of the unit.
Pointing Angle
In initialization, the unit will drive to a preset “Home” pointing angle based on the potentiometer
reading for each axis. After initialization, the unit can be commanded to return to this pointing
angle by pressing the Home Button on the Joystick Controller. The stable platform will hold this
angle until any joystick motion is detected. Full ranges of offsets to this starting point (within
mechanical limits) are settable by the user through a RS-232 connection of the Joystick Controller
(See Appendix B - Set New Home Position Section).
Inertial Mode
In this mode, the unit will stabilize both the pan and tilt axis of the platform. In “I” mode, the pan
and tilt axis will compensate so that the platform can stay pointed at a specific location regardless
of the motions of the vehicle on which it is mounted. Any joystick commands to move the platform
are relative to its stabilized position. Inertial mode is the default mode at startup for the platform.
When the platform is operating in inertial mode, the LED on the position mode button will not be
illuminated. The user can toggle between Inertial Mode and Position mode by pressing the Position
Mode button on the Joystick Controller.







































































