







12
13
「 3 in 1 Robot Gripper—Parallel Four Finger Gripper 」
Note: For the robot of the handling type, after installing
this step, it can be fixed to the robot with screws.
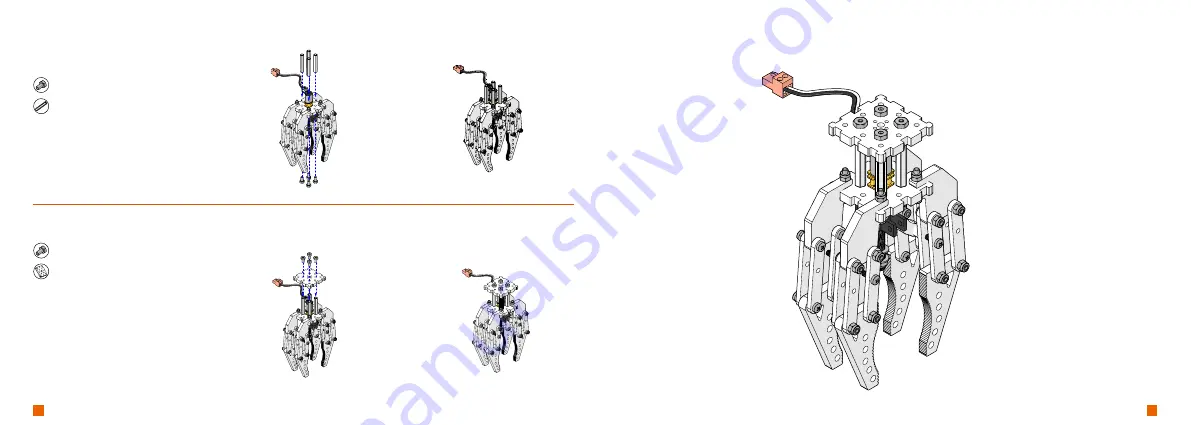
4xScrew M4*10
4xNylon Stud M4*35
▶ 06:Install Nylon Stud
→
→
4xScrew M4*10
1xN30 Motor Bracket
▶ 07:Install the Bottom N30 Motor Bracket
「 3 in 1 Robot Gripper—Parallel Four Finger Gripper 」
Congratulations, the parallel four cross finger
Gripper robot is installed.































































