




























160
CHAPTER 6 - DETAILED PARAMETER DESCRIPTION
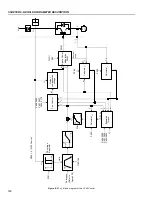
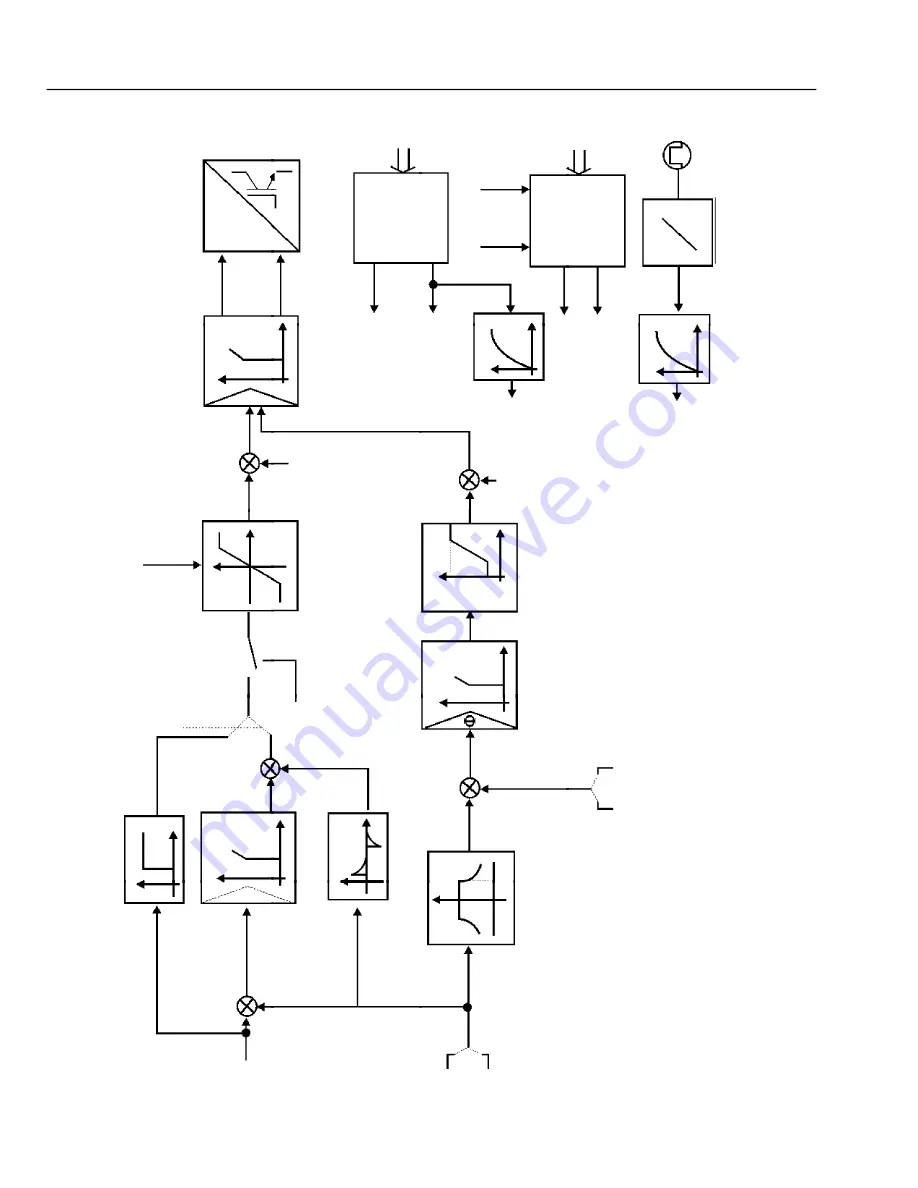
Figure 6.27 a)
- Block diagram of the Vector Control
G
p
=
P
1
6
1
G
I
=
P
1
6
2
n
1
-
n
2
n
E
C
IM
R
Y
s
IM
R
*/
Y
s
*
-
P
17
9
P
17
7
P
2
0
2
Id
*
-
Id
n
2
E
s
ti
m
a
te
d
s
p
e
e
d
Y
s
S
ta
to
r
F
lu
x
T
r
1
2
m
s
n
1
Iq
Id
-
Iq
*
Iq
P
P
R
Iq
Id
F
n
T
R
A
N
S
F.
E
n
c
o
d
e
r
T
R
A
N
S
F.
Is
P
W
M
P
W
M
U
S
d
*
U
S
q
*
n
T
o
ta
l
R
e
fe
re
n
c
e
E
n
c
o
d
e
r
S
e
n
s
o
rl
e
s
s
F
lu
x
R
e
g
u
la
to
r
G
p
=
P
1
7
5
G
I
=
P
1
7
6
C
u
rr
e
n
t
R
e
g
u
la
to
r
G
p
=
P
1
6
7
G
I
=
P
1
6
8
P
2
9
7
=
S
w
it
c
h
F
q
.
S
p
e
e
d
R
e
g
u
la
to
r
G
p
=
1
.0
0
G
I
=
0
.0
0
C
o
m
m
a
n
d
v
ia
D
Ix
P
1
7
8
=
N
o
m
in
a
lF
lu
x
P
1
8
0
=
n
F
W
P
2
0
2
A
I2
,
A
I3
/P
2
3
7
,
P
2
4
1
=
2
-M
a
x
.
T
o
rq
u
e
C
u
rr
e
n
t
P
1
6
9
=
M
a
x
.
F
W
D
T
P
1
7
0
=
M
a
x
.
R
E
V
T
T
o
rq
u
e
C
u
rr
e
n
t
Iq
E
x
c
it
a
ti
o
n
C
u
r.
Id
IM
R
M
a
g
n
e
ti
z
in
g
C
u
rr
e
n
t
P
4
0
5
=
P
P
R
U
s
(S
p
e
e
d
/T
o
rq
u
e
C
o
n
tr
o
l
re
fe
r
to
ta
b
le
6
.4
0
)
S
e
n
s
o
rl
e
s
s
w
/
e
n
c
o
d
e
r
R
id
e
-T
h
ro
u
g
h
=
O
F
F
R
id
e
-
T
h
ro
u
g
h
=
O
N
R
e
fe
r
to
fi
g
.
6
.4
2
P
1
6
5
G
d
=
P
1
6
6
-
+







































































