




























201
CHAPTER 6 - DETAILED PARAMETER DESCRIPTION
Range
[Factory Setting]
Parameter
Unit
Description / Notes
NOTE!
This parameter works together with P322, P323, P325, P326 for
Ride-Through in Vector Control, and with P331, P332 for V/F Control
Ride-Through and Flying Start.
NOTE!
Ud = Vac x 1.35.
324 V to 513 V
(P296 = 2)
[459 V]
1 V
356 V to 564 V
(P296 = 3)
[505 V]
1 V
388 V to 615 V
(P296 = 4)
[550 V]
1 V
425 V to 674 V
(P296 = 5)
[602 V]
1 V
466 V to 737 V
(P296 = 6)
[660 V]
1 V
486 V to 770 V
(P296 = 7)
[689 V]
1 V
559 V to 885 V
(P296 = 8)
[792 V]
1 V
P322
(6)
178 V to 282 V
Ud Ride-Through
(P296 = 0)
[245 V]
1 V
307 V to 487 V
(P296 = 1)
[423 V]
1 V
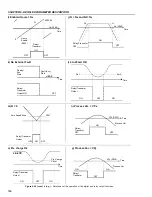
Ride-Through for Vector Control (P202 = 3 or 4)
The purpose of the Ride-Through function, in Vector Mode (P202 = 3 or
4), is to ensure that the inverter maintains the motor running during the
line loss, not allowing interruption or fault storing. The energy required
for motor running is obtained from the kinetic energy of the motor (inertia)
during its deceleration. As soon as the line is reestablished, the motor
accelerates again to the speed defined by the reference.
After line loss (t0), the DC Link voltage (Ud) starts to decrease in a rate
that depends on the motor load condition and may reach the undervoltage
level (t2), if the Ride-Through function is not operating. The time required
for this condition, typical for rated load, situates in a range from 5 to 15 ms.
With Ride-Through function active, the line loss is detected when Ud
voltage becomes lower than the “Ud line loss” value (t1). The inverter
immediately starts a controlled motor deceleration, regenerating the
energy into the DC Link and thus maintaining the motor running, where
the Ud voltage is regulated to the “Ud Ride-Through” value.
If the line loss is not recovered, the motor remains in this condition as
long as possible (depending on the energy equilibrium), until the
undervoltage condition (E02 at t5) occurs. If the line loss is recovered
(t3) before the undervoltage condition, the inverter detects its
reestablishment when the Ud voltage reaches the “Ud Loss Recover”
level (t4). Then the motor is accelerated according to the set ramp,
from the current speed value up to the value defined by the active
speed reference. Refer to figure 6.42.
If the input voltage drops to a value between parameters P322 and
P323, the values of P321, P322 and 323 shall be readjusted.
This parameter
is shown on the
display(s) only when
P202 = 3 or 4
(Vector Control)







































































