


























Available Motor Control Types
CFW500 | 7-15
8
Table 7.6:
Control word
Bit
Function
Description
0
Ramp Enable.
0:
Stops the motor by deceleration ramp.
1:
Turn the motor according to the acceleration ramp until reaching the speed reference value.
1
General Enable.
0:
Disable the inverter completely, interrupting the power supply to the motor.
1:
Enable completely the inverter, allowing the operation of the motor.
2
Run Clockwise.
0:
Run the motor in the opposite direction of the reference signal (counter clockwise).
1:
Run the motor in direction of the reference signal (clockwise).
3
JOG Enable.
0:
Disable JOG function.
1:
Enable JOG function.
4
Remote.
0:
Inverter goes into Local mode.
1:
Inverter goes into Remote mode.
5
2
nd
Ramp.
0:
Acceleration and deceleration ramp by P0100 and P0101.
1:
Acceleration and deceleration ramp by P0102 and P0103.
6
Quick Stop.
0:
Disable Quick Stop.
1:
Enable Quick Stop.
7
Fault Reset.
0:
No function.
1:
If in fault state, reset the fault.
8 to 15
Reserved.
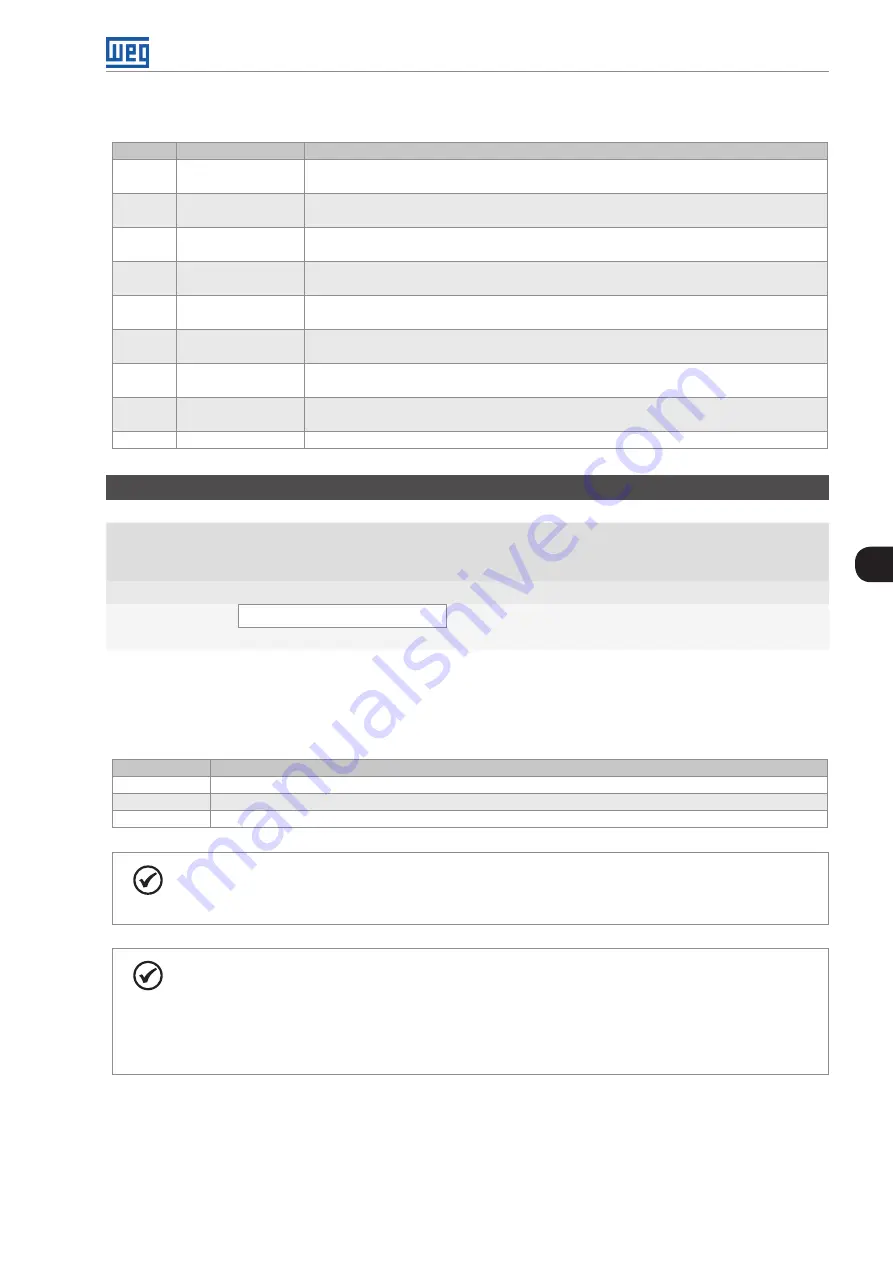
P0229 – Stop Mode Selection
Adjustable
Range:
0 = Ramp to Stop
1 = Coast to Stop
2 = Quick Stop
Factory
Setting:
0
Properties:
cfg
Access Groups
via HMI:
I/O
Description:
This parameter defines the motor stop mode when the inverter receives the “Stop” command.
describes the options of this parameter.
Table 7.7:
Selection of stop mode
P0229
Description
0
The inverter will apply the stop ramp programmed in P0101 and/or P0103.
1
The motor will run free until it stops.
2
The inverter will apply the stop ramp programmed in P0106.
NOTE!
When the Coast Stop mode is programmed and the Flying Start function is disabled, only activate
the motor if it is stopped.
NOTE!
This parameter is applied to all the inverter command sources, but it was created aiming at allowing
the command via HMI to be able to disable the motor by inertia instead of deceleration ramp. In this
way, when P0229 = 1, Bit 0 of the control word (Ramp Enable) has a function similar to Bit 1 (General
Enable). The same way, the digital input functions such as: Run/Stop, Forward/Reverse Run and
Command with Three Wires turn off the motor by inertia in this condition of P0229.
7.3.1 Control via HMI Inputs
Contrary to the network interfaces and SoftPLC, the HMI commands do not access the inverter control word
directly, because of limitations of key functions and HMI behavior. The HMI behavior is described in
HMI AND BASIC PROGRAMMING on page 4-1
.
Summary of Contents for CFW500 V1.8X
Page 2: ......
Page 4: ......
Page 8: ...Contents...
Page 34: ...General Information 2 4 CFW500...
Page 38: ...About the CFW500 3 4 CFW500 3...
Page 42: ...HMI and Basic Programming 4 4 CFW500 4...
Page 52: ...Programming Basic Instructions 5 10 CFW500 5...
Page 56: ...Identification of the Inverter Model and Accessories 6 4 CFW500 6...
Page 76: ...Available Motor Control Types 8 4 CFW500 8...
Page 84: ...V f Scalar Control 9 8 CFW500 9...
Page 170: ...Communication 17 8 CFW500 17...







































































