




























44-
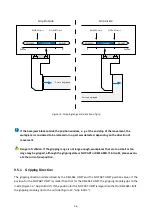
GRIP command, the fingers move apart, since the NO PART LIMIT value is greater than the RELEASE LIMIT
value. To release the workpiece, execute the program sequence in Figure 16. Since GRIP 1 has been config-
ured in this example, grip index 1 must also be used when executing the above program sequences. The
gripping state is visualized via the HOLD display on the gripping module.







































































