


























6
EN
GL
ISH
TM
6.1.2
Output circuit GRIPKIT CR EASY:
The gripping state is dispended via the outputs of the gripping module. The outputs are
designed as a push-pull circuit.
OUT1
OUT0
Gripping state
0 V
0 V
Error/not initialized (ERROR/NOT INITIALIZED)
0 V
24 V
Workpiece released (RELEASED)
24 V
0 V
No workpiece detected (NO PART)
24 V
24 V
Holding workpiece (HOLDING)
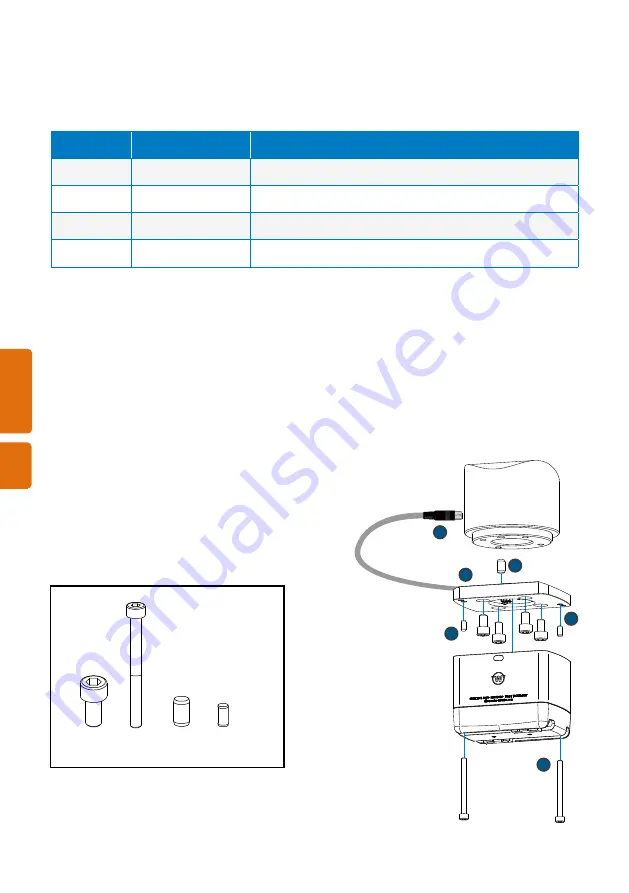
7
Assembly instruction
1. Insert the supplied cable into the flange, matching your robot brand
2. Insert the Ø6 mm cylindrical pin into the flange and position it on the robot.
3. Tighten the flange to the robot.
4. Insert the Ø4 mm cylindrical pins into the flange.
5. Screw the gripper module tom the flange.
6. Plug the cable into the robot.
Accessories kit contains:
6
1
2
3
4
5
ISO 4762 M6 X 10
4x
ISO 2338B 6h8 X 10
1x
2x
ISO 2338B 4h8 X 8
ISO 4762 M4 X 45
2x
Summary of Contents for GRIPKIT CR EASY
Page 15: ...13 DEUTSCH TM 3 4 5 6 7...
Page 22: ...INSTRUCTION MANUAL GRIPKIT CR EASY...
Page 35: ...13 ENGLISH TM 3 4 5 6 7...
































































