






















6
DEU
TS
CH
TM
Eingang
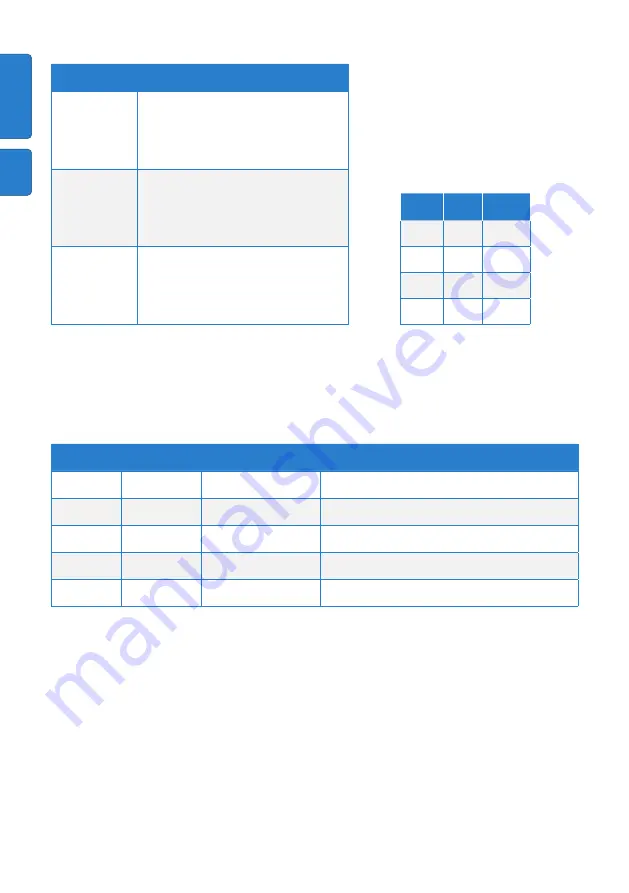
Funktion GRIPKIT CR PLUS
INO
GRIP
Aktiv: Werkstück greifen
Passiv: Werkstück freigeben
IN1
INDEX.0
Griffindex Bit 0
Selektiert den auszuführenden Griff
IN2
INDEX.1
Griffindex Bit 1
Selektiert den auszuführenden Griff
6.1.2
Ausgangsschaltung
Der Greifzustand wird über die Ausgänge des Greifmoduls ausgegeben. Die Ausgänge
sind als Push-Pull Schaltung ausgeführt.
Out 2
OUT1
OUT0
Greifzustand
0V
0V
0V
Warten auf Befehl (IDLE)
0V
0V
24V
Werkstück freigeben (RELEASED)
0V
24V
0V
Kein Werkstück detektiert (NO PART)
0V
24V
24V
Werkstück gegriffen (HOLDING)
24V
0 oder 24V
0 oder 24V
Fehler
7 Lieferumfang
Folgende Kompontenten sind im Lieferumfang des GRIPKIT
CR PLUS
für UR enthalten:
•
Greifmodul (siehe Kapitel „Modellvarianten“)
•
Aktive Montageplatte (siehe Kapitel „Modellvarianten“)
•
Anschlusskit für GRIPKIT EASY/PLUS (Teile-Nr. 5070018)
•
Nur bei GRIPKIT CR PLUS S: zwei Distanzplatten (Teile-Nr. 5020063)
•
USB-Stick mit Software (Teile-Nr. 5090008)
•
Kurzanleitung GRIPKIT CR PLUS (Teile-Nr. 5080030)
Griff
IN1
IN2
0
p
p
1
a
p
2
a
p
3
a
a
Summary of Contents for GRIPKIT CR PLUS
Page 16: ...14 DEUTSCH TM 3 4 5 6 7...
Page 24: ...INSTRUCTION MANUAL GRIPKIT CR PLUS ENGLISH TM...
Page 38: ...14 ENGLISH TM 3 4 5 6 7...






































































