























WLKATA Mirobot Manipulator User Manual
Document version 1.0 User Manual Copyright© Beijing Tsinew Technologies Co., Ltd.
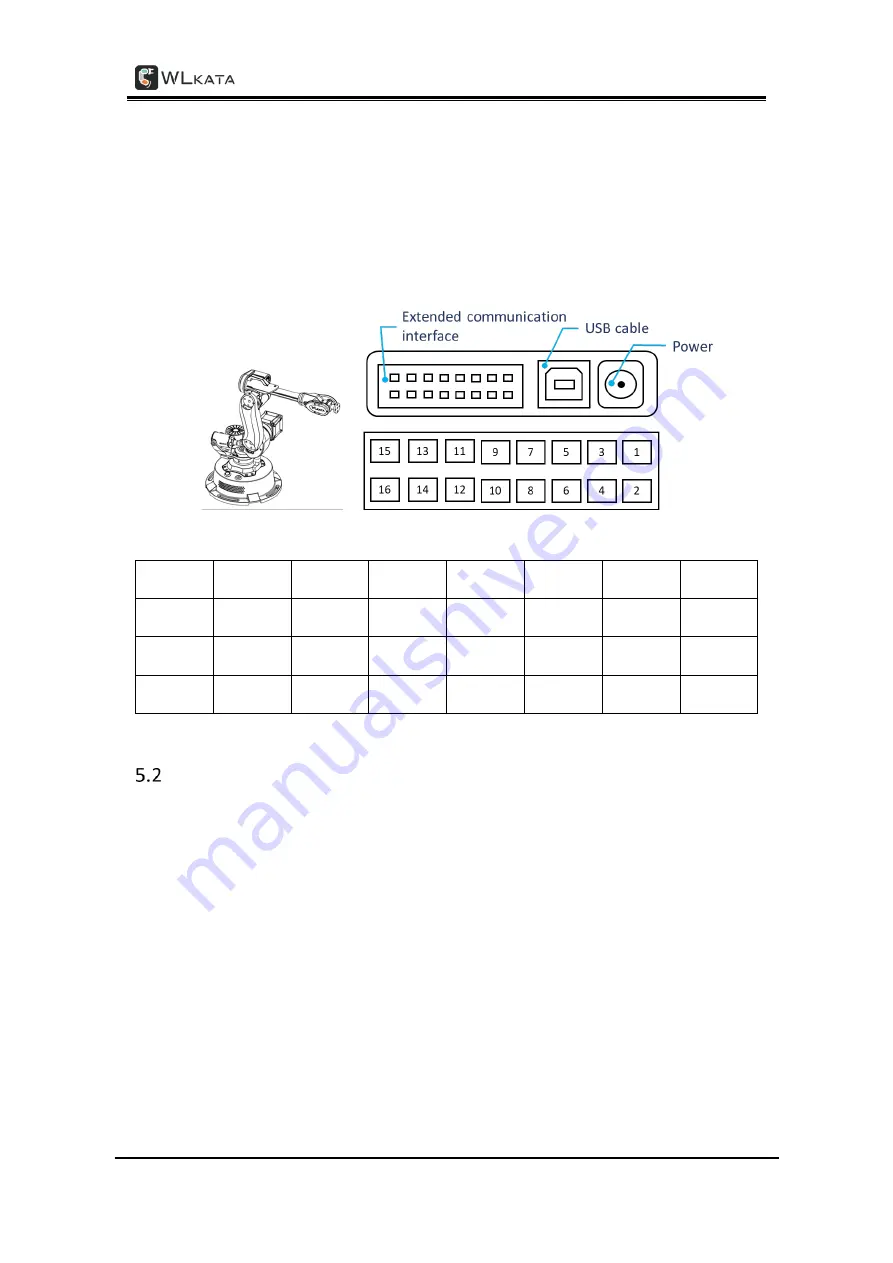
The PIN of the extended communication interface and the definition of each pin is shown in
Figure below.
•
Ex0 represents the output of pwm1, and EX1 represents the output of pwm2. 1b,
2b, 1a, and 2A refer to the four interfaces of the external sliding rail stepping
motor.
15
13
11
9
7
5
3
1
2A
2B
EX0
5V
GND
GND
RX_3
RX_2
16
14
12
10
8
6
4
2
1A
1B
EX1
-
-
-
TX_3
TX_2
PIN and Pin definition of back extension communication interface of substructure
Interface board of the Extender Box
The WLKATA Mirobot external communication interface needs to be connected with the
external expansion interface board (the Extender Box) by using an IDC cable. The common
external interface board of WLKATA Mirobot and the Pin definition is shown in Figure below.







































































