




















6
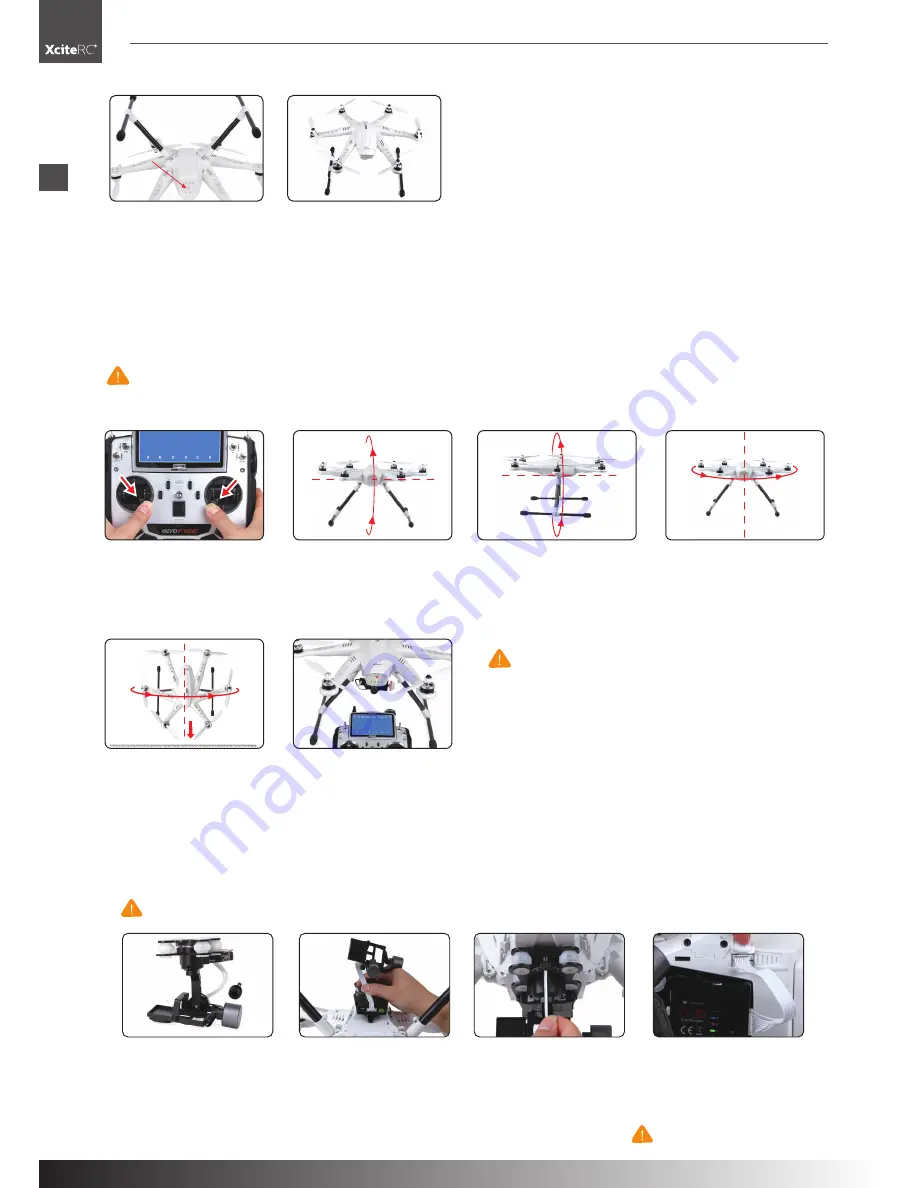
Kompasskalibrierung
·
Gimbalmontage
DE
Das Landegestell ist im Auslieferungszustand in angezogener Position.
ACHTUNG:
versuchen Sie nicht, das Landegestell manuell herauszuziehen!
Das Landegestell fährt nach der Bindung automatisch nach unten.
Gehen Sie dazu wie folgt vor:
1. Stecken Sie den aufgeladenen
Akku in das Akkufach. Noch
nicht einschalten.
*Beachten Sie die Ladehinweise
im Kapitel “Akku laden”.
2. Drehen Sie den Scout X4 auf
“den Rücken”. Vergewissern
Sie sich, das sich das Lande-
gestell frei bewegen kann.
Akkuanzeige
Power Taste
EIN/AUS
Schalter
6. Stellen Sie das Modell auf
eine gerade, stabile Fläche.
3. Bringen Sie alle Schalter in
Position 0, alle Trimmungen
und Drehregler in Mittel-
position, den Gashebel in die
unterste Position und schalten
den Sender ein.
4. Während der Sender bootet,
schalten Sie den X4 über den
Schalter und durch 3-5 Sek.
Drücken der POWER Taste
ein. Die grünen LEDs der
Akkuanzeige blinken, das
Landegestell klappt hoch.
5. Bringen Sie den Scout X4 in
die aufrechte Postion. Die rote
LED sollte innerhalb einer
Minute aufhören zu blinken.
Die Bindung zwischen Modell
und DEVO F12E Sender war
erfolgreich.
Rote LED
Kompasskalibrierung
Boden
Nase nach unten
WICHTIG:
Alle Trimmungen müssen auf neutral stehen und die Motoren müssen gesichert sein. Der Quadrocopter darf nicht rot blinken!
Beachte:
Nach dem Binden sind die Motoren automatisch gesichert. Lesen Sie dazu auch den Abschnitt Motoren entsichern/sichern.
2. Drehung vorwärts: drehen Sie
das Modell in 90° Schritten,
jeweils unterbrochen von einer
1 Sekunde Pause alle 90°.
(0 / 90 / 180 / 270 / 360)
1. Bewegen Sie beide Steuer-
knüppel in die untere, mittlere
Position und halten sie. Der
Quadrocopter beginnt schnell
rot zu blinken.
3. Drehung seitwärts: drehen Sie
das Modell in 90° Schritten um
die Rollachse, jeweils unter-
brochen von einer 1 Sekunde
Pause alle 90°.
(0 / 90 / 180 / 270 / 360)
4. Horizontale Drehung: drehen
Sie das Modell in 90° Schritten
um die Gierachse, jeweils unter-
brochen von einer 1 Sekunde
Pause alle 90°.
(0 / 90 / 180 / 270 / 360)
5. Nase nach unten: drehen Sie
das Modell in 90° Schritten
um die Hochachse, jeweils
unterbrochen von einer 1
Sekunde Pause alle 90°.
(0 / 90 / 180 / 270 / 360)
6. Bringen Sie den Quadrocopter
wieder in Normalposition. Das
schnelle Blinken der roten LED
stoppt. Die Kalibrierung war
erfolgreich. Stecken Sie den Akku
ab, um die Einstellung zu speichern.
ACHTUNG: Bei den ersten Flügen werden Sie den bemerken, dass
das Modell leicht “driftet”.
Dieses Verhalten ist normal. Fliegen Sie das Modell weiter im manuellen
Modus, das Modell kalibriert sich während des Fluges weiter. Nach ca.
5-10 Minuten sollten Sie landen und die Motoren sichern, um die Ein-
stellungen zu speichern.
Beachte: Dieses leichte Driften wird die ersten 4-5 Akkus weitergehen,
allerdings werden Sie bei jedem Akku eine Verbesserung der
GPS-Stabilität und Präzision im Halten der Position bemerken.
Beachte: Diese Kalibrierungsflüge sollten idealerweise fern von
elektrischen Feldern wie Hochspannungsleitungen oder
auch metallischen Flächen geschehen.
Montage des Gimbal
ACHTUNG:
Entfernen Sie während der Gimbal- Montage den Akku aus dem Modell! Der Gimbal muss mit großer Vorsicht behandelt
werden! Wenden Sie während der Installation keine Gewalt an.
1. Legen Sie den G-3D Gimbal
und die M3x12 Schraube mit
Feder bereit.
3. Drehen Sie nun die M3x12mm
Schraube mit Feder ein.
Ziehen Sie die Schraube von
Hand gut fest oder verwenden
den beiliegenden Inbusschlüssel.
4. Verbinden Sie das 9-polige
Datenkabel mit dem
“Complex data port” an der
Unterseite des Scout, an-
schließend mit dem Gimbal.
2. Schieben Sie den Gimbal auf
von vorne auf die Befestigungs-
schiene und bewegen ihn bis
zum Anschlag nach hinten.
WARNUNG:
Der Stecker ist verpolungssicher.
Achten Sie auf die seitlichen Führungen.
Wenden Sie keine Gewalt an!
5. Vergewissern Sie sich, dass
sich der Gimbal in alle Richtungen
frei bewegen kann.
H500
Summary of Contents for 16002050 Walkera Tali H500 Hexacopter RTF...
Page 20: ...20 Konformit tserkl rung Declaration of conformity H500...
Page 21: ...21 H500...
Page 22: ...22 H500...
Page 23: ...23 H500...
































































