



























22
XciteRC Rocket 400 GPS
EN
Getting started
·
Landing
WARNING:
If the battery warning is active (Quadrocopter pipes LED’s blink), try to land as quickly as
possible and don’t try to bring back the model via the Coming-Home function –
danger of falling!
If the mode is active, the green LED of the transmitter is on, furthermore an acoustic beep signal is to be
heard.
Flight Direction Lock:
This mode saves the current „forward direction“. This means whatever direction
the model’s nose is pointing to, after the activation the edge which showed forward during flight is front. For
activation make sure the switches are in correct position.
Regard:
This mode is in need of getting used to for beginners, therefore more suited for experienced model
pilots. The Coming Home mode also works with activated Flight Direction Lock.
Altitude Hold:
Let the model fly to the favoured height in a stable position and adjust the switches to the
correct position. Then move the throttle lever to center position. This height is now automatically kept. The
rest of the control functions remain as usual.
Regard:
Depending on wind speed the model may need more
or less room for corrections. Only use this function if enough height is available – so don’t activate too close
to the ground – danger of falling!
Regard:
You can overcome this position by hand through strong throttle inputs.
If the mode is active, the green LED of the transmitter is on, furthermore an acoustic beep signal is to be
heard.
Failsafe Coming Home:
If no transmitter signal can be received (z.B. model out of reach, obstacles or
empty transmitter battery), the Failsafe Coming Home is automatically activated. The model returns to the
starting position (resp. the position in which the motors were unlocked).
If you want to cancel the Failsafe Coming Home (for example the model is within sight again and therefore
controllable), bring the switches each to position:
SWA on position 0: to 1 and back again.
SWA on 1 or 2: to 0 and then 1 and again 0
Getting started
Before you begin please check:
•
WARNING:
Only start with a sufficiently full transmitter batteries (rechargeable batteries) and fully
charged drive battery –
crash hazard!
• Check all parts for damage and dirt. Replace any damaged parts and clean the model, because dirt
increases the weight and therefore can degrade the flying qualities.
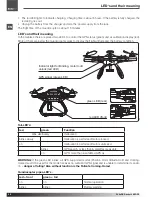
1. Put battery into battery compartment and plug in. Place the Quadrocopter on an even surface and don’t
move it anymore until the start. The red and green tail-LED of the model will blink alternately fast.
2. As soon as the two LED’s slowly blink, you can close the battery compartment.
3. Now turn on the transmitter. Regard: Switch SWA and SWB in position 0, throttle lever to the lowest po-
sition = no throttle. The binding is finished as soon as the transmitter’s beep-sound stops.
Note:
Perform
steps 1-3 also if you need to re-bind the Quadrocopter to the transmitter, for example, after a transmitter
change.
4. GPS: Wait approximately 2 minutes, until the green LED on the model is permanently on.
WARNING:
If the green LED blinks during start, all GPS-supported modes (Position-Hold, Altitude-
Hold and Coming-Home) mustn’t be used for the model receives no sufficient GPS-signal and is unable
to determine its position –
danger of falling! Also without function is the Failsafe Coming-Home!
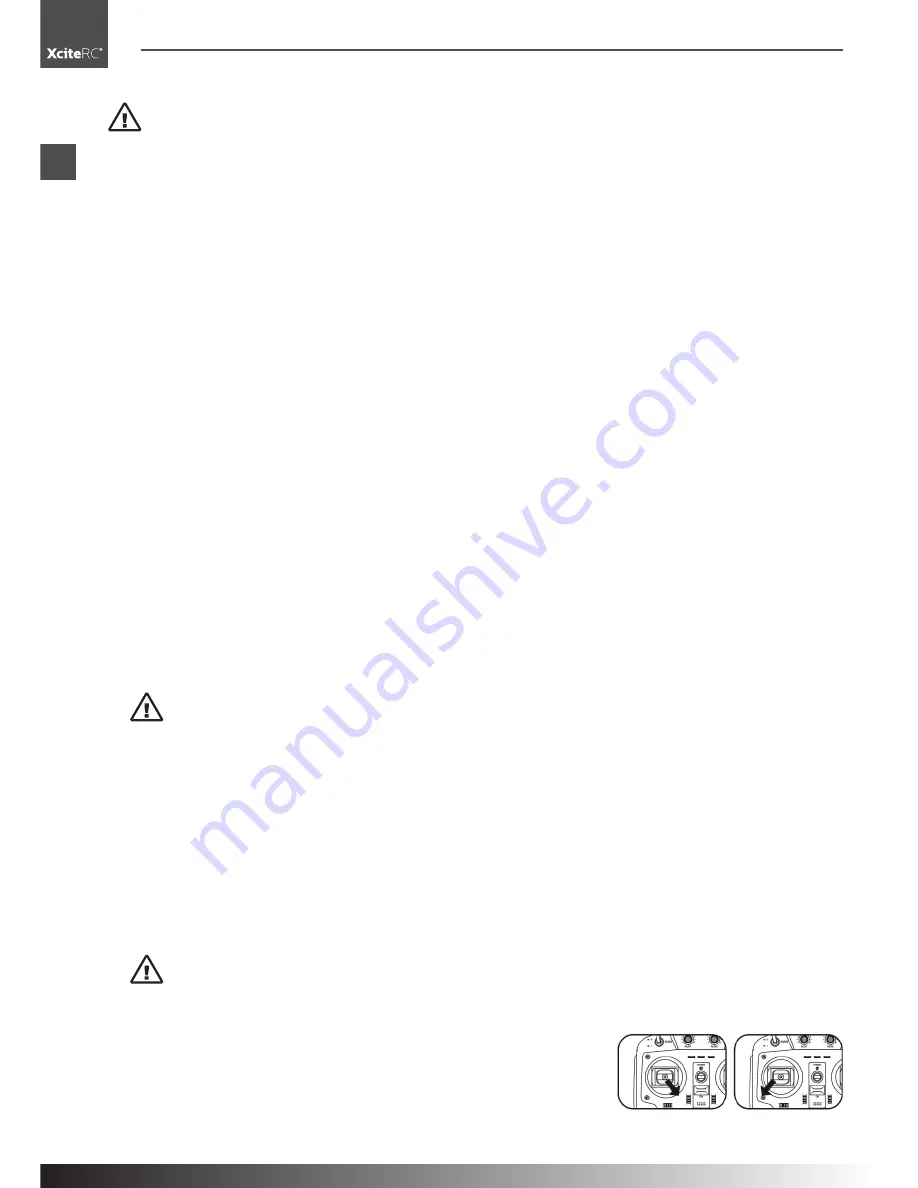
5. Unlock motors: Move the throttle lever to the lowest right position and
wait until the red LED of the model stops blinking. You can now start
your model.
6. Lock motors: Move the throttle lever to the lowest left position and
wait until the red LED blinks. If you now open the throttle the motors
won’t start. For reasons of security always use this mode if you are not
Motor unlock
Motor lock






































































