






















34
XciteRC Rocket 400 GPS
FR
Départ et voler
·
Atterissage
quement (Voir paragraphe Utilisation). Pour re décoller, mettez l’interrupteur SWA en position 0 et déverrouil-
lez les moteurs.
DANGER:
dès que l’alarme accu est déclenchée (LEDs des poutres support moteurs qui clignotent), posez
le modèle dans les plus brefs délais et n’essayez pas de le faire revenir par la fonction Coming-Home -
Risque de Crash!
Si ce mode est activé la LED verte de l’émetteur est allumée, de plus un Bip sonore retentit.
Flight Direction Lock:
Dans ce mode, c’est le sens de la marche avant qui est enregistré, quelque soit la
direction dans laquelle se trouve le nez du modèle, après activation, c’est la partie qui est vers l’avant qui est
prise en considération.
Pour l’activer, mettez les interrupteurs dans leur position correcte.
A noter:
pour le débutant, ce mode nécessite au départ une certaine accoutumance, c’est pourquoi ce
mode est plutôt réservé au pilotes expérimentés. Le mode Coming Home fonctionne également lorsque le
mode Flight Direction Lock est activé.
Altitude Hold:
Meteez le modèle à l’altitude souhaitée, dans une position stable et mettez les interrupteurs
dans la position correcte, puis mettez le manche de commande des gaz au milieu. Cette altitude sera
maintenue automatiquement. Toutes les autres commandes restent fonctionnelles. A noter: Selon la force
du vent, le modèle aura besoin de plus ou moins de place jusqu’à ce qu’il se stabilise.
N’utilisez cette
fonction que si vous êtes suffisamment haut – c’est à dire pas trop près du sol,–
Risque de Crash!
A noter:
en mettant violemment les gaz ou en les retirant, vous pouvez „écraser“ cette fonction et reprendre
manuellement le contrôle du modèle.
Si ce mode est activé, la LED verte de l’émetteur reste allumée, de plus un Bip sonore retentit.
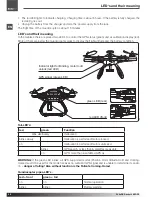
Failsafe Coming Home:
Si aucun signal de l’émetteur n’est reçu (par ex. modèle hors de portée, obstacles
ou accu d’émission vide), Failsafe Coming Home se déclenche automatiquement. Le modèle rejoint automa-
tiquement son point de décollage (à l’endroit où les moteurs ont été démarré)
Si vous voulez interrompre le mode Failsafe Coming Home (par ex. lorsque le modèle est de nouveau en vue
et ainsi de nouveau pilotable), mettez les interrupteurs, en fonction de leur position:
SWA en position 0: sur 1, puis revenir sur 0
SWA en position 1 ou 2: sur 0, puis sur 1, puis revenir sur 0
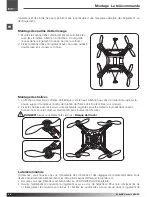
Départ et voler:
DANGER:
Ne naviguer que si les piles de l’émetteur sont encore suffisamment chargées et qui si l’accu
de propulsion est chargé entièrement–
Perte de contrôle!
• Vérifiez toutes les pièces du Rocket 400 GPS, il ne faut pas qu’elles soient endommagées ou sales.
Remplacez les pièces défectueuses et nettoyez le modèle, la saleté, qui augmente le poids du modèle,
entrave les caractéristiques de la navigation.
1. Placez l’accu dans son logement et branchez-le. Posez le Quadrocopter sur une surface plane et ne le
déplacez plus avant le décollage. Les LEDs rouge et verte à l’arrière du modèle clignotent alternativement
à un rythme rapide.
2. Placez l’accu dans son logement et branchez-le. Posez le Quadrocopter sur une surface plane et ne le
déplacez plus avant le décollage. Les LEDs rouge et verte à l’arrière du modèle clignotent alternativement
à un rythme rapide.
3. Dès que le rythme de clignotement des deux LEDs ralentit, vous pouvez refermer le logement accu.
4. Allumez maintenant l’émetteur. Notez: Interrupteur SWA et SWB en position 0, manche de commande
des gaz en bas = pas de gaz. La liaison est établie dès que le bip sonore émis par l’émetteur s’arrête.
Remarque:
Suivez les étapes 1-3, si vous avez besoin de re-lier le Quadrocopter à l‘émetteur, par exem-
ple, après un changement de l‘émetteur.
5. Calibrage: Il se peut, mais c’est assez rare, que le Quadrocopter vole de manière instable et qu’il a du mal
à maintenir sa position, dans ce cas, il faut refaire un calibrage. Procédez de la manière suivante:
































































