





























83
15
14
13
12
11
10
9
8
r
oms
ila
oms
rm
r
r
r
Targetreached
7
6
5
4
3
2
1
0
w
sod
qs
ve
f
oe
so
rsto
r = reserved (No correspondence) w = warning
sod = switch on disabled
oms = operation mode specific qs = quick stop
(control mode based on bit) ve = voltage enabled
ila = internal limit active f = fault
oe = operation enabled
rm = remote so = switched on
rtso = ready to switch on
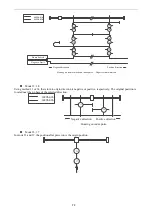
bit13,12,10 (operation mode specific):
Bit
Name
Value
Definition
10
target
reached
0
halt=0 (normal): 6074h (Torque demand) not reach target torque
halt=1 (stop as halt): axis is decelerating
1
halt=0 (normal): 6074h (Torque demand) reach the target torque
halt=1 (stop as halt): axis stop (axis speed is 0)
12
reserved
-
Not use
13
reserved
-
Not use
4.
TQ control mode action explanation
TQ control mode generates torque command based on the following parameters:
Target torque (6071h)
Torque slope (6087h)
Target torque is 6071h (Target torque), torque slope is 6087h (Torque slope). The max speed is limited through
6080h (Max motor speed), the max torque is limited by the min value among 6072h (Max torque), 2312h
(P3-28), 2313h (P3-29).
Operation steps:
(1) Turn off motor enable, set object word 6060 to 4, set target torque 6071h, max motor speed 6080h and max
torque 6072h.
(2) Turn on the motor enable, the motor should increase the output torque according to the set torque slope until
the set value and the speed does not exceed the set maximum speed.
5.
Operation example
Taking Xinje DF3E low-voltage servo as an example, the configuration and control process of TQ mode are
briefly introduced. The specific use method of servo software is shown in Appendix 10.
①
click [scan] or [add slave station] in CANopen configuration interface, configure the object binding of TxPDO
and RxPDO. Here, several common objects of TQ mode are bound. If you have other requirements, you can add
them by yourself and enable the configured PDO. The specific configuration is shown in the figure below.







































































