

























31
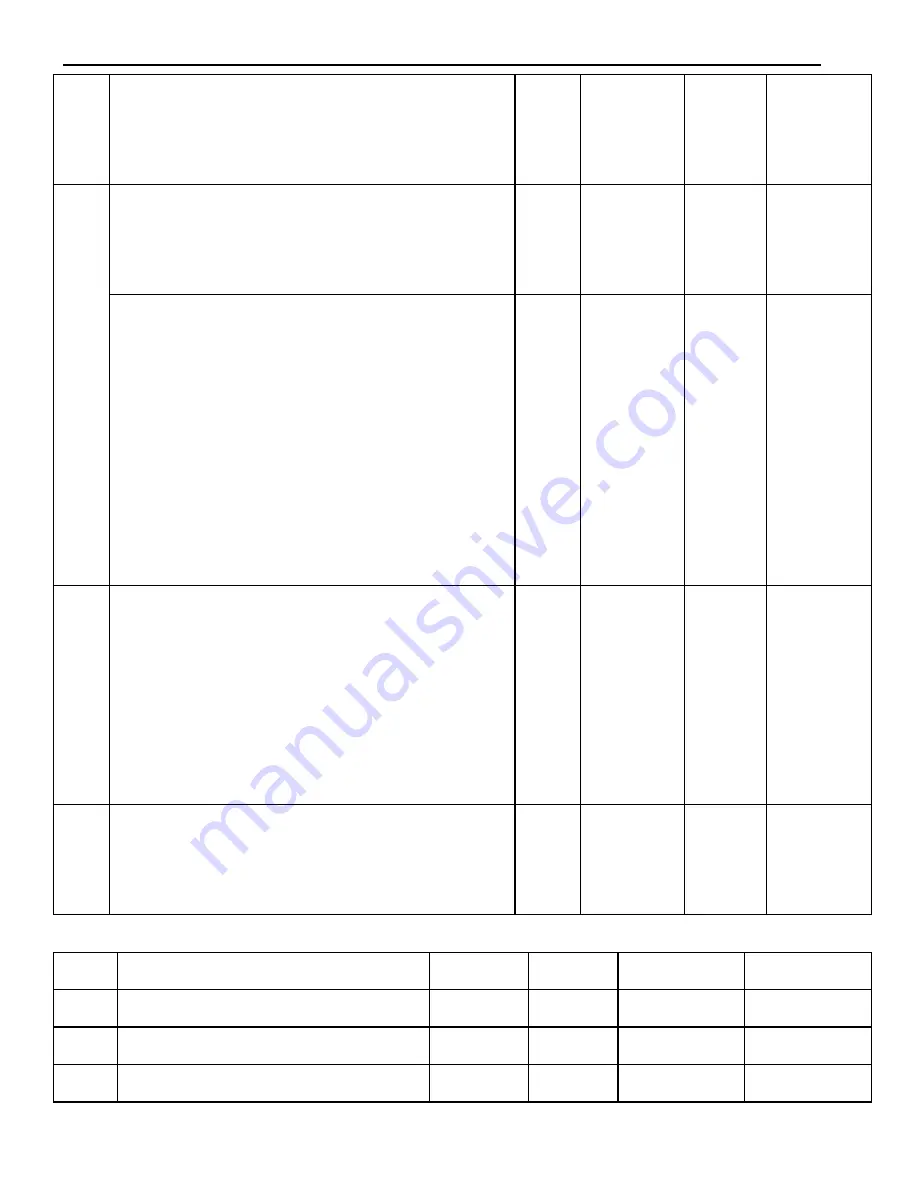
forward rotate
1:From the side view of motor load, CW is
forward rotate
06
06.L: stop mode when servo OFF or alarm.
DS2 series default is inertia stop. Keep the
inertia motion after stop.
-
2
0
~
2
●
06.H: over range (OT) stop mode
0~1: inertia stop. Keep inertia motion after
stop.
2: deceleration stop. Change to zero clamp
after stop. Torque: P4-06 urgent stop torque.
3: deceleration stop. Change to inertia
motion after stop. Torque: P4-06 urgent stop
torque.
-
2
0
~
3
●
07
T-REF distribution
0: undefined.
1: make T-REF as external torque limit input
2: undefined.
3: when P-CL, N-CL is ON, make T-REF as
external torque limit input.
-
0
0
~
3
○
08
V-REF distribution
0: -
1: make V-REF as external speed limit input.
-
0
0
、
1
○
2. P1: control parameters (Address
:
0100
~
01FF)
P1-
Name
Unit
Default
Range
Effective
00
The gain of speed loop
1Hz
100
1
~
5000
√
01
Speed loop integral time
0.1ms
400
1
~
50000
√
02
The gain of position loop
1/s
100
1
~
2000
√







































































