


















4
Base size
:
180
;
Feedback component: M
(
Photoelectric pulse coder
)
;
Performance Specifications: First 3 numbers mean rated torque, last 2 numbers mean rated
revolution;
For instance:35015
:
rated torque 35N·m,rated revolution 1500rpm
;
48015
:
rated torque 48N·m,rated revolution 1500rpm
;
Shaft Specifications
:
A
-
Without key
;
B
-
With key
;
Power-loss brake
:
Null
-
Have it
;
Z
-
Not have it
;
Voltage level
:
4-380V
;
Capacity
:
5.5KW
、
7.5KW.
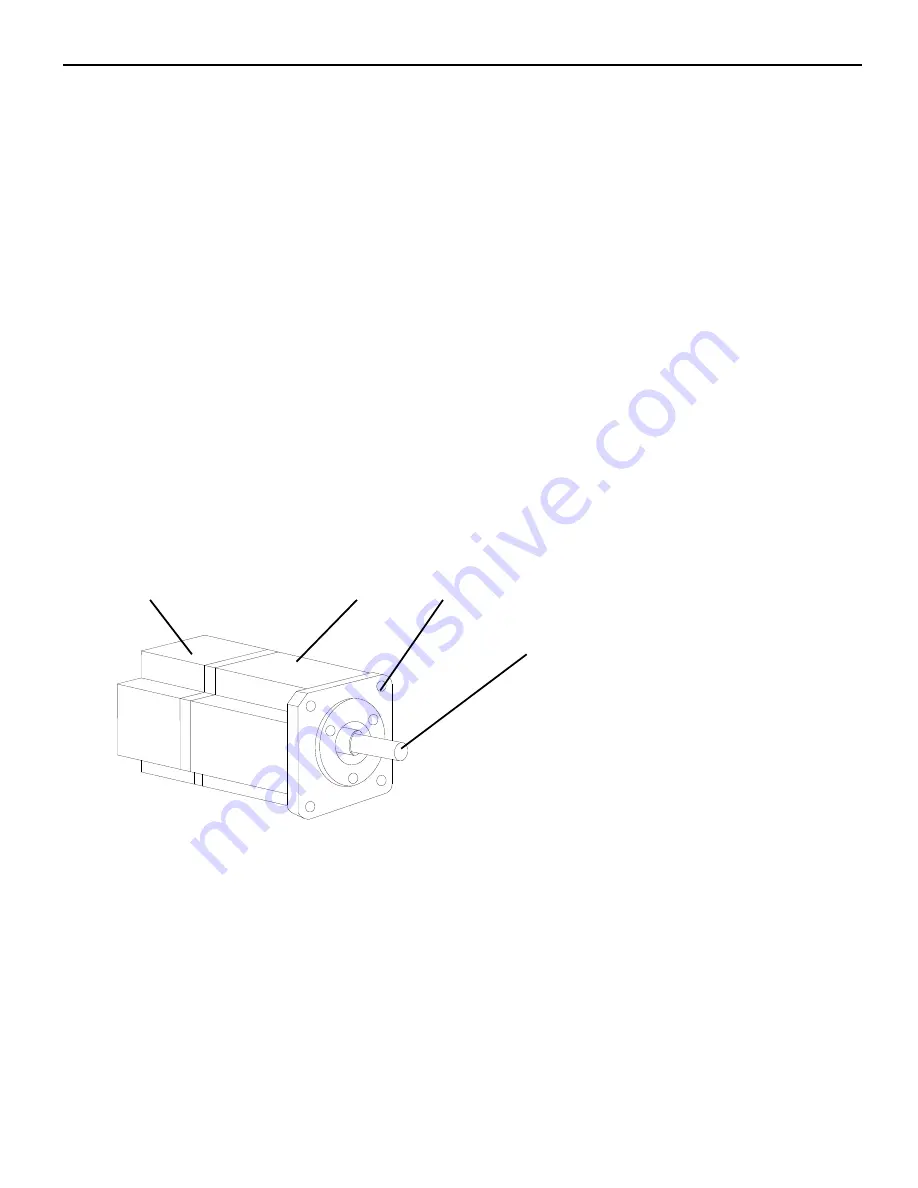
3. Sections description
1
)
Servo motor
Encoder code
Frame
Flange
Output (transmission) shaft







































































