





























8
Appendix
Appendix 1. Group P parameters
Modification and effective:
“○” means modifying when servo OFF and take effect at once.
“√” means modifying anytime and take effect at once.
“●” means modifying when servo OFF and take effect when power on again.
“
△
” means modifying anytime and take effect when the motor doesn’t rotate.
For parameters set in hexadecimal system, the prefix "n." is added to the setting value to indicate that
the current setting value is hexadecimal number.
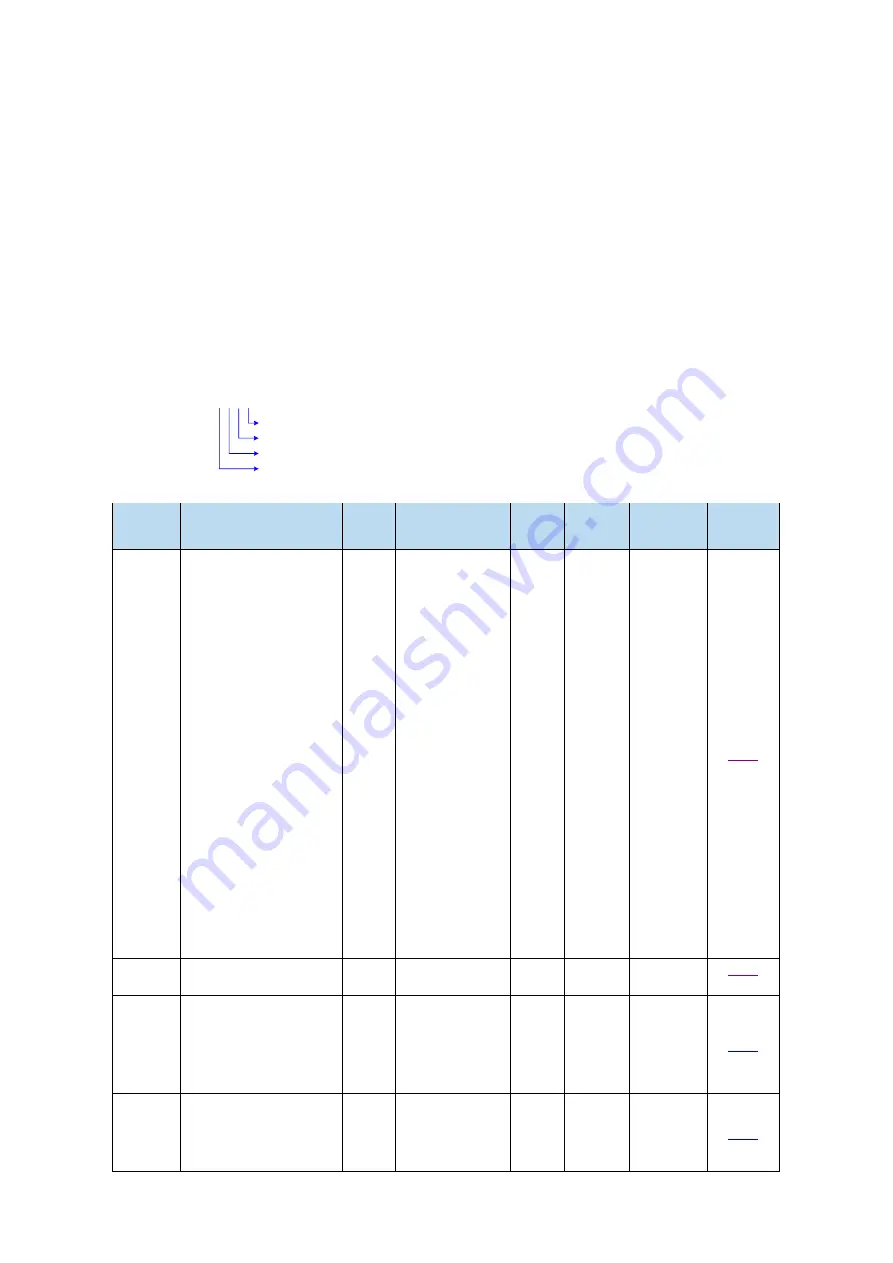
Composition of parameters:
PX-XX=n. x x x x
PX-XX.0
PX-XX.1
PX-XX.2
PX-XX.3
P0-XX
:
Parameter
Function
Unit
Default value
Range Effective
Suitable
mode
Reference
chapter
P0-01
Control mode 1
1-Internal Torque Mode
2-External Analog
Torque Mode
3-Internal speed Model
4-External Analog speed
Mode
5-Internal Location
Mode
6-External Pulse
Position Mode
7-External Pulse speed
Mode
8-XNET Bus Torque
Mode
9-XNET Bus Speed
Mode
10-XNET Bus Location
Mode
-
6
1~10
○
1|2|3|4|5|6|7|
8|9|10
P0-02
Control mode 2
(ditto)
-
6
1~10
○
1|2|3|4|5|6|7|
8|9|10
P0-03
Enabling mode
0-not enabled
1-IO enable
2-Software Enablation
3-XNET Bus Enablation
-
1
0~3
○
1|2|3|4|5|6|7|
8|9|10
5.2.2
P0-04
Rigidity grade
-
20P1
:
0
20P2/20P4/20P7
:
15
>=21P5
:
10
0~63
△
1|2|3|4|5|6|7|
8|9|10
Summary of Contents for DS5L1 Series
Page 1: ...DS5L1 series servo driver User manual WUXI XINJE ELECTRIC CO LTD Data No SC5 05 20200929 1 0 ...
Page 2: ......
Page 6: ......
Page 100: ...3 Set the auto tuning interface 4 Click ok to start inertia identification ...
Page 106: ...3 set the auto tuning interface ...
Page 112: ...with higher rigidity 6 Start auto tune 7 Open the servo enable then click ok ...
Page 169: ...Appendix 9 Torque speed characteristic curve ...
Page 170: ......







































































