




























t
t
v
v
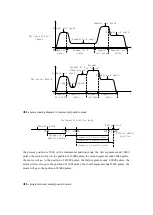
Set speed S1
Acceleration time S2
Target position S0
Deceleration time
Acceleration time S2
Set speed S1
Changed speed
Changed absolute
position
0
0
the speed and position did not
change
target position and speed
changed
:
◆
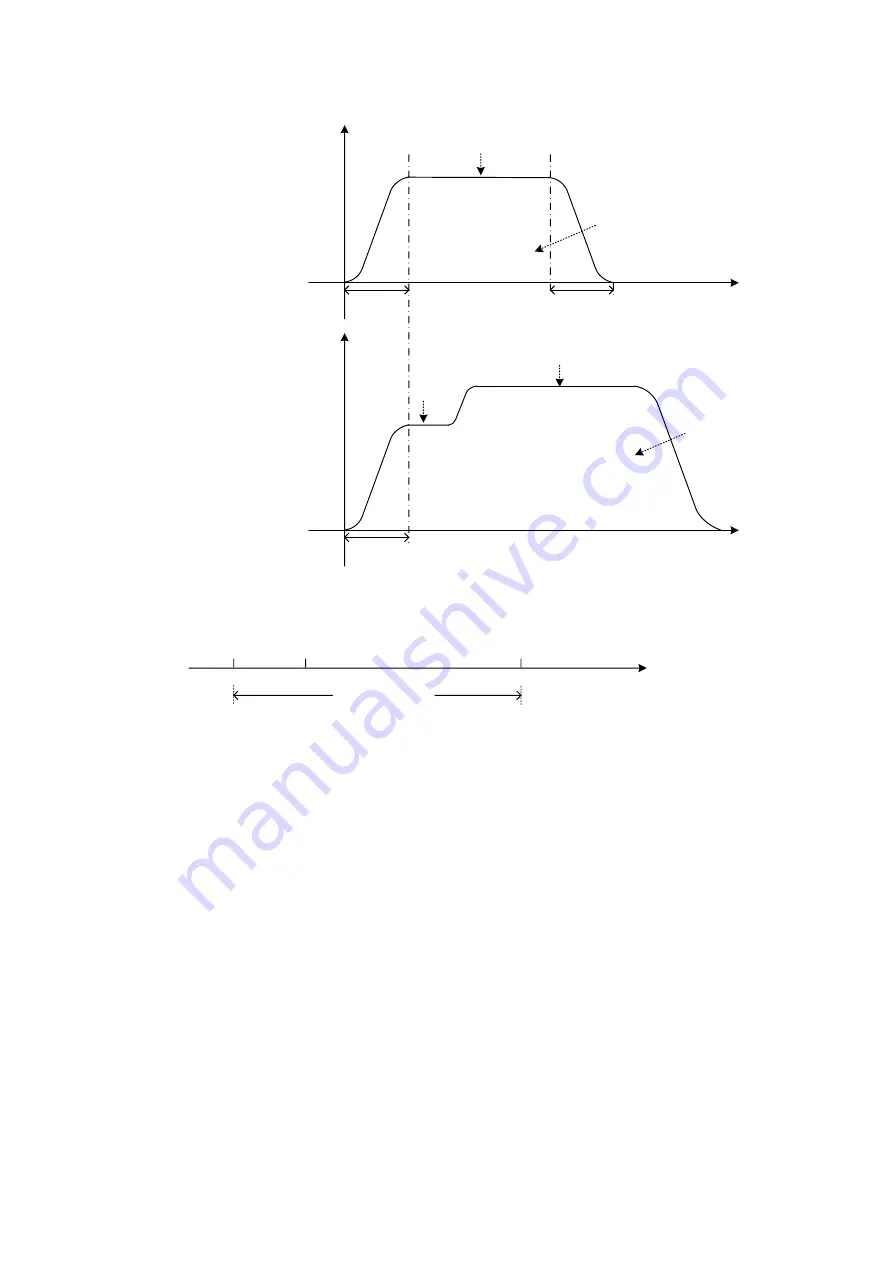
motor running distance in absolute position mode
Start point
2000
10000
Absolute position 10000
Target position
Present position/pulse
numbers
0
The present position is 2000, it needs 10000 pulse numbers to reach target position 10000 in
absolute position mode.
◆
The ladder chart in absolute position mode:






















































