





























SM2
DMOV
K10000
HD0
DMOV
K5000
HD2
DMOV
K26000
HD10
MOTOS
HD0
HD100
K1
M0
DMOV
K6000
SD2032
M1
SM2001
RST
M0
RST
M1
DMOV
K1000
HD12
DMOV
K-20000
HD20
DMOV
K7500
HD22
DMOV
K25000
HD30
DMOV
K4000
HD32
DMOV
K0
HD100
DMOV
K4
HD102
DMOV
K50
HD104
DMOV
K50
HD106
PLC start running, when the coil SM2 is ON, the pulse numbers, speed, motion mode, segment
number, acceleration/deceleration time will be stored in related registers.
The servo enabled, M0 is from OFF to ON, it executes the instruction MOTOS.
M1 is from OFF to ON, the new speed is stored in the related register.
When the pulse sending end, the running flag SM2001 reset, the related coils will be reset.
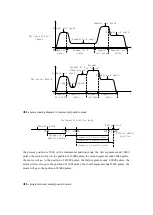
◆
the motor running diagram in absolute position mode:





















































