





























3-2
.
Return the origin
It no needs to make program for X-NET fieldbus returning the origin, please just set the close
signal (60*(N-1)), origin signal (60*(N-1)), high speed of returning the
origin VH(60*(N-1)), low speed of returning the origin VL(60*(N-1)),
creeping speed (60*(N-1)). When the servo enable signal is ON, the returning the
origin operation can be done through positive returning origin coil (20*(N-1)) and
reverse returning origin coil (20*(N-1)).
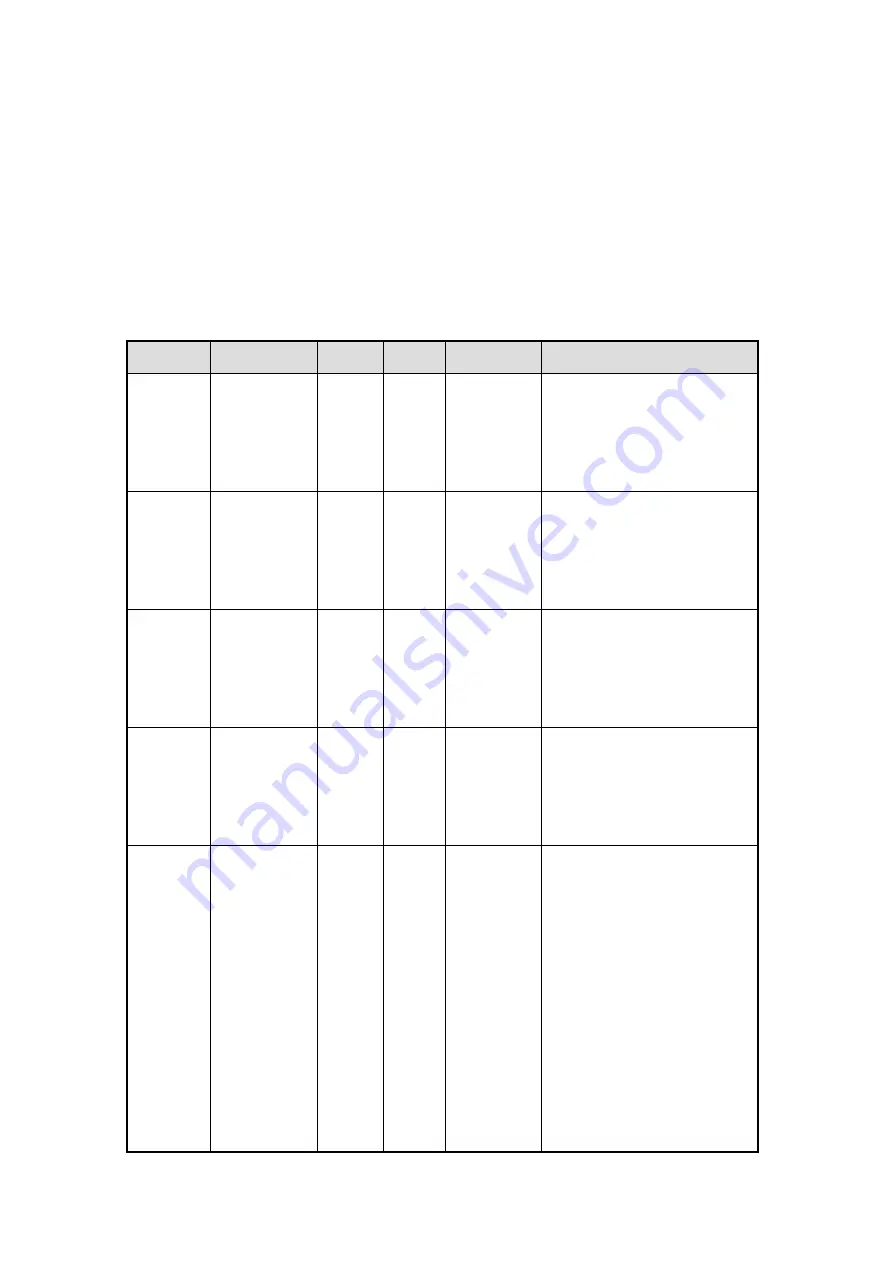
The parameters table:
Address
Definition
Type
Unit
Initial value
Notes
SFD3034
+60*(N-1)
Min position
limit terminal
16-bit
integer
0xFF
Appoint the X terminal no.,
0xFF is no terminal, negative
number
represents
inverse
logic, the inverse logic of X0 is
-30000
SFD3035
+60*(N-1)
Max position
limit terminal
16-bit
integer
0xFF
Appoint the X terminal no.,
0xFF is no terminal, negative
number
represents
inverse
logic, the inverse logic of X0 is
-30000
SFD3036
+60*(N-1)
Close signal
terminal
16-bit
integer
0xFF
Appoint the X terminal no.,
0xFF is no terminal, negative
number
represents
inverse
logic, the inverse logic of X0 is
-30000
SFD3037
+60*(N-1)
Origin
terminal
16-bit
integer
0xFF
Appoint the X terminal no.,
0xFF is no terminal, negative
number
represents
inverse
logic, the inverse logic of X0 is
-30000
SFD3038
+60*(N-1)
Return origin
mode
16-bit
integer
0
0: search the close point with
VH speed, then search the
origin point with VL speed,
decelerate after finding the
origin point, then search the
origin point in reverse direction
with creeping speed
1: search the close point with
VH speed, then search the
origin point with VL speed,
decelerate after finding the
origin point, then search the
origin point in reverse direction






















































