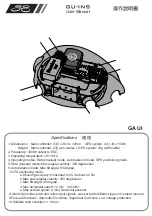
If you are not familiar with the controls of the X250 please take a few minutes to familiarize yourself
with them before attempting your first flight.
Throttle
Elevator / Pitch
Rudder / Yaw
Aileron / Roll
Basic Flight Instructions
1. Make sure the LiPo battery is fully charged.
2. Insert the charged LiPo battery into the X250 and connect
3. Turn on the transmitter and follow the Binding of the Radio Transmitter and Receiver instructions.
4. Advance the throttle slowly to rise the X250 off the ground.
5. When the LiPo battery power starts to gets low, the LED’s on the X250 will begin to blink indicating
that it’s to time to land and recharge.
6. After becoming familiar with the flight controls of the X250 and gaining confidence you will be
ready to move on to flips, rolls and faster forward flight.
If you experience any abnormal movements during flying you can recalibrate the X250’s gyro.
To recalibrate the X250 place the X250 on a level surface and connect the battery.
Making sure the throttle control stick is positioned downwards turn on the transmitter.
To activate the bind move the throttle control stick full forwards and then back to the lowest position.
On reaching the lowest position you will hear and audible “beep” from the transmitter and the LED’s
on the quadcopter will change from flashing to solid to show the quadcopter is bound.
Hold both control sticks to the bottom left, the LED’s will all flash to show calibration is taking place,
once the LED’s stop flashing you can move the throttle stick back to the lowest centre position and
the right stick to the centre. The X250 is then recalibrated and ready to fly.
To active headless mode you have to press and hold down the CF button for 3 seconds. Once
CF/Headless mode is active the transmitter will emit a slow constant beep to show it is in headless
mode, the rear LED on the X250 will also flash to show headless mode is active.
Once in headless mode no matter which way the quadcopter is pointing, forward will always be
forward, backwards will always be backwards, left will always be left and right will always be right.
Gyro/Accelerometer Calibration
Fail Safe / Signal Loss
If the X250 loses connection with the transmitter, after 2-3 seconds the power to the motors will
reduce and then cut to save the X260 from flying out of control. The LED’s on the X250 will also
begin to flash.
Quadcopter status LED’s blink
continuously for more than 4 seconds
after the battery is connected. No
Response from the control input
Unable to bind to the transmitter.
Repeat the power up sequence and
rebind the Transmitter and
Quadcopter
No response after the battery is
connected to the Quadcopter
1. Battery is not charged.
2. Transmitter batteries are low
3. Poor battery connection
1. Make sure the battery is fully
charged
2. Check and replace the transmitter
batteries
3. Re-seat the battery to ensure a
good battery connection
Motor does not respond to the throttle
stick and the LED’s flash
Quadcopter LiPo battery
voltage is too low
Fully charge the battery or replace
with a fully charged battery
Main rotor continues to spin after
landing
Throttle trim has been accidentally
knocked during flight
Check the throttle trim is in the centre
or slightly below
Main rotor spins but quadcopter is
unable to take off
1. Rotors are damaged
2. Battery is very low
3. Rotors incorrectly fitted
1. Replace the main rotors
2. Charge or replace with a fully
charged battery
3. Check the rotors and correct if
needed
Roll & Flips
Summary of Contents for x250
Page 1: ......
Page 2: ...4 X250 28 X250 27 ...