





























23
Document MT0605P.2018.E
© Xsens Technologies B.V.
MTi User Manual
The aluminum base plate of the MTi is carefully aligned with the output coordinate system during the
individual factory calibration. The alignment of the bottom plane and sides of the aluminum base-plate
with respect to the sensor-fixed output coordinate system
(S)
is within 0.1 deg. Convenient alignment
points are designed in the base plate of the MTi.
The non-orthogonality between the axes of the body-fixed co-ordinate system,
(S)
, is <0.05
. This also
means that the output of 3D linear acceleration, 3D rate of turn (gyro) and 3D magnetic field data all will
have orthogonal xyz readings within <0.05
as defined in the figure above.
5.2.2 Delta_angle and delta_velocity
The SDI output of the MTi contain delta_angle (dq, DataID 0x8030) and delta_velocity (dv, DataID
0x4010). These values represent the orientation change and velocity change during a certain interval.
In the MTi, this interval is 2.5 ms (400 Hz) by default. The values dq and dv are always represented in
the same coordinate system as calibrated inertial data and magnetic field data (see section 5.2.1), which
can be
(S)
or
(O)
.
5.2.3 Orientation data
By default the local earth-fixed reference coordinate system
(L)
used is defined as a right-handed
Cartesian co-ordinate system with
1
:
X positive to the East (E).
Y positive to the North (N).
Z positive when pointing up (U).
This coordinate system is known as ENU and is the standard in inertial navigation for aviation and
geodetic applications. Note that it is possible to change the local coordinate system
(L)
using a different
convention (NWU or NED), by changing the alignment matrix or applying an orientation reset.
1
The default reference coordinate system (
L
) only applies to the MTi in Normal output mode. Refer to the LLCP
manual for detailed orientation output specifications when using the ASCII (NMEA) output mode.
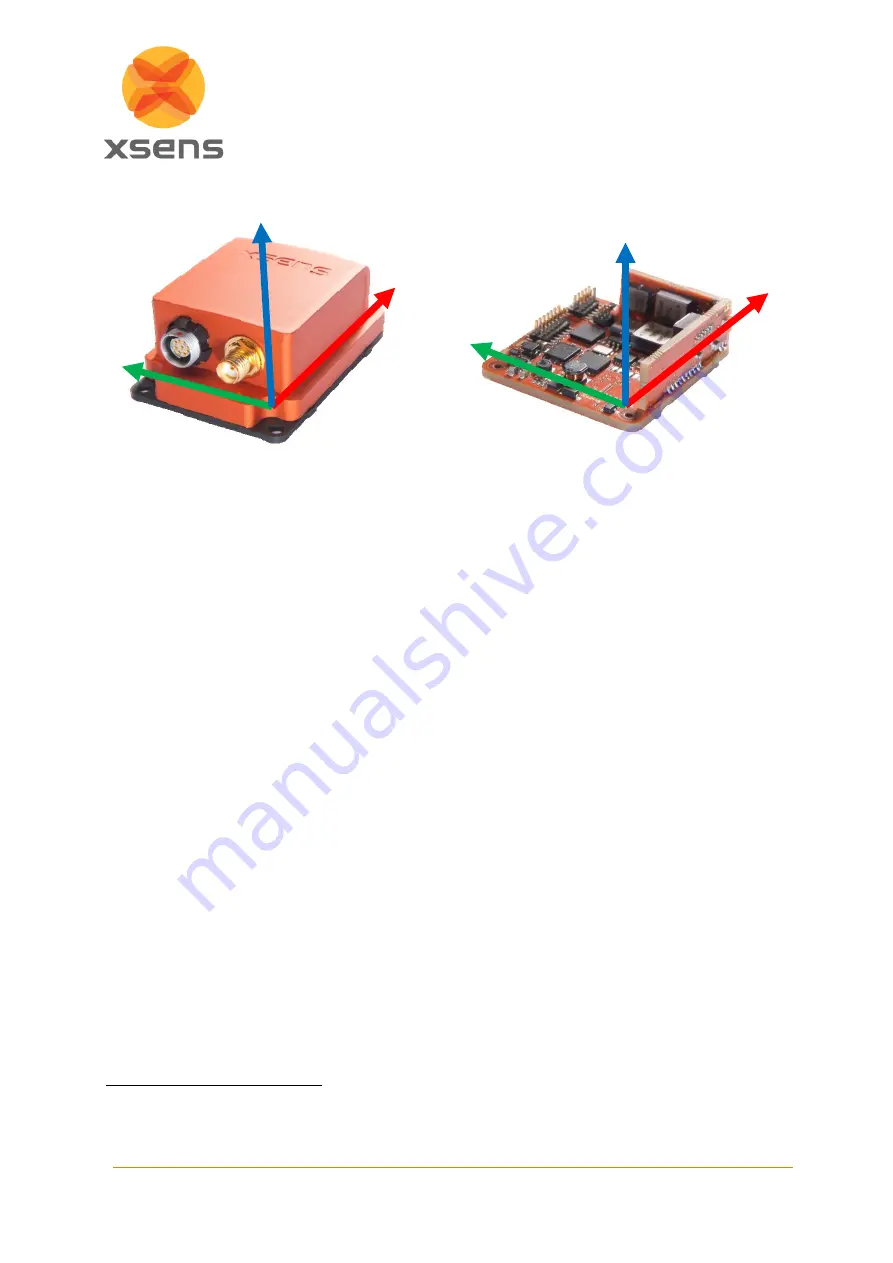
z
x
y
Figure 8: coordinate system of the encased MTi
(Note: origin is located at the accelerometers)
z
x
y
Figure 9: Coordinate system of the MTi-OEM
(Note: origin is located at the accelerometers)





































































