
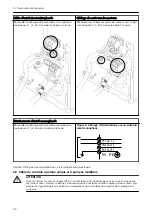

























Protocole
Modbus RTU
2. Sélectionner le protocole de communication
Adresse
1
3. Sélectionner l'adresse
Vit. transmission
9600
4. Sélectionner le débit en bauds
Parité/bits arrêt
Parité paire 1 Arrêt B
5. Sélectionner la configuration réseau
Continuer vers la Maintenance?
Non
6. Sélectionner Non pour quitter
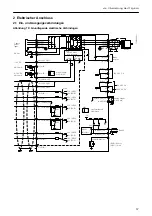
4 Informations supplémentaires
4.1 Description du contrôle de rampe
Le contrôle du système utilise des rampes fixes pour réguler les variables du système fin de suivre le point de
consigne comme décrit ci-dessous.
Les rampes peuvent être définit sur l’une des valeurs prédéfinies.
• Lente : grande taille de pompe
• Moyenne : moyenne taille de pompe
• Rapide : petite taille de pompe
Durée de
rampe
Booster
CVC
Rampe 1
Rampe 2
Rampe 1
Rampe 2
Haut
Bas
Haut
Bas
Haut
Bas
Haut
Bas
Rapide
4
4
70
70
8
8
90
90
Moyen
6
6
70
70
12
12
90
90
Lent
8
8
70
70
16
16
90
90
La rampe est exprimée en secondes et représente le temps nécessaire pour que le moteur passe de 0 Hz à la
fréquence maximale, ou de la fréquence maximale à 0 Hz.
Rampe 1 (montante ou descendante) est toujours utilisée en dessous de la fréquence minimale/fréquence
en veille et quand la valeur du retour est hors de la bande de régulation.
Rampe 2 (montante ou descendante) est utilisée quand la valeur du retour est à l’intérieur de la bande de
régulation.
Le contrôle du moteur utilisera la rampe montante (1 ou 2) jusqu’à ce que la valeur du retour atteigne la limi-
te supérieure de la bande de régulation. Une fois que la limite supérieure est atteinte, le contrôle du moteur
utilisera la rampe descendante (1 ou 2) jusqu’à ce que la valeur du retour atteigne la limite inférieure de la
bande de régulation.
Paramètre
Description
3–41
Temps d'accél. rampe 1
fr - Traduction de l'original
52
Summary of Contents for LOWARA Aquavara IPC
Page 24: ...2 5 Wiring for Speed Control en Original instructions 24 ...
Page 223: ...2 5 Hız Kontrolü için Kablolama tr Orijinal çeviri 223 ...
Page 259: ...2 5 أسلاك وحدة التحكم في السرعة ar ترجمة الاصلي 259 ...
Page 277: ...2 5 속도 제어 배선 ko 원본 번역 277 ...
Page 291: ...개인 메뉴 매개변수 번호 기본 값 매개변수 이름 25 18 22 51 30 곡선 종료 지연 25 19 22 52 20 곡선 종료 허용오차 ko 원본 번역 291 ...







































































