


























18
TECHNICAL APPENDIX
ASYNCHRONOUS MOTOR STARTING SYSTEMS
72
Direct
Suitable for low-power motors.
The starting current (Is) is much higher than the rated
current (In).
Starting current Is = In x 4 ÷ 8
Starting torque Ts = Tn x 2 ÷ 3
Indirect
• Star/Delta
The starting current (Is) is three times less than the direct
starting current.
Starting current Is = In x 1.3 ÷ 2.7
Starting torque Ts = Tn x 0.7 ÷ 1
In the star to delta changeover phase (approx. 70 ms) the
motor is not supplied and tends to reduce its rotation
speed.
In the case of submersible electric pumps with power
above 10 HP, the modest mass of the rotor causes a
slowdown at changeover, so that the initial Star supply
phase is rendered partially useless.
In such cases we recommend using impedance panels or
an autotransformer.
• Impedances
The motor is started with a voltage which is lower than
the rated one, and which is obtained by means of
impedances.
The Lowara panels use impedances which cut down to
70% the starting voltage.
The switch to the rated voltage takes place without any
interruptions of the power supply.
Rated voltage Un = 400 V
Starting voltage Us = Un x 0,7 = 280 V
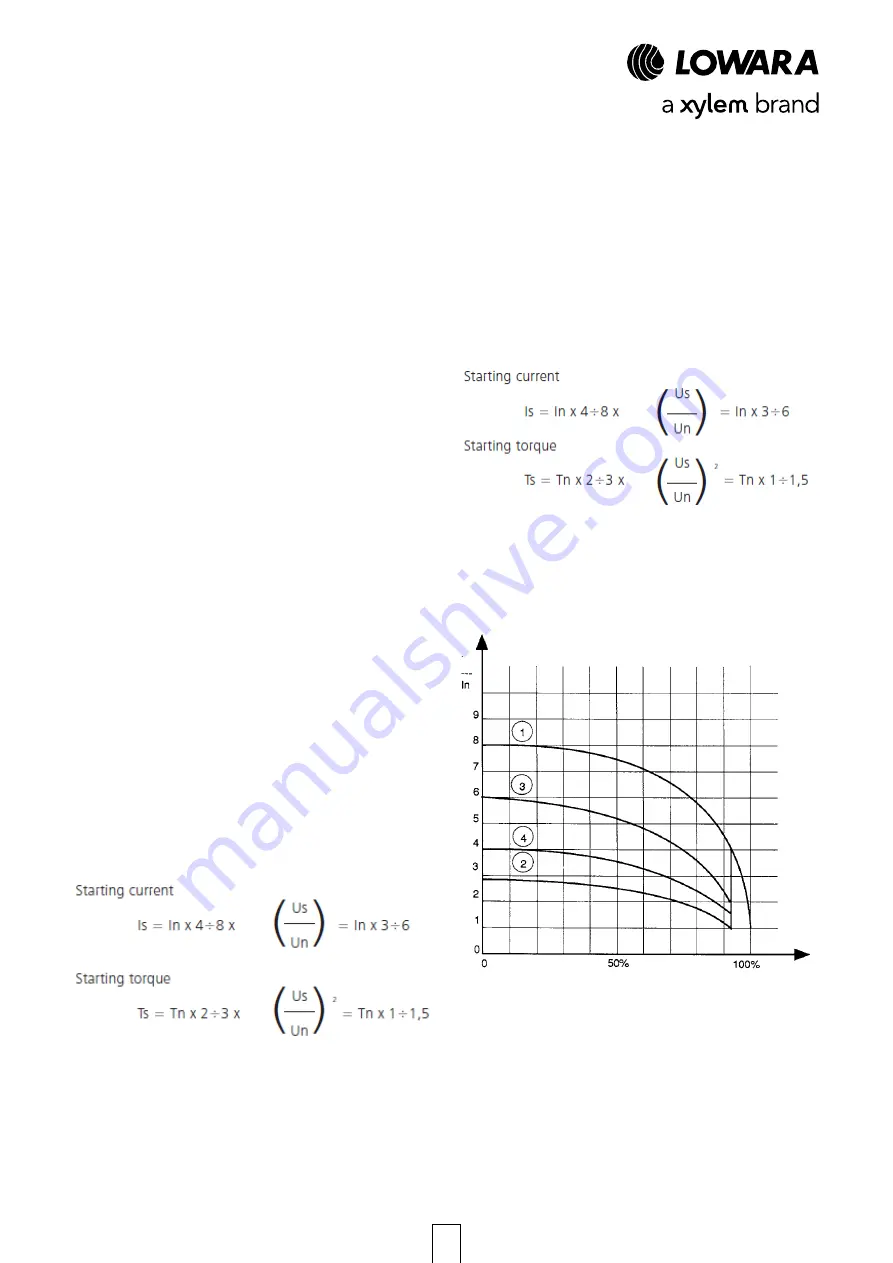
Starting current
Us
Is = In x 4÷8 x
= In x 3÷6
Un
Starting torque
Us
Ts = Tn x 2÷3 x
2
= Tn x 1÷1,5
Un
DIAGRAM OF STARTING INPUTS
1 = Direct
SPEED’
2 = Star-Delta
3 = Impedances
4 = Autotransformer
Autotransformer
The pump is started with a voltage which is lower than
the rated one.
The Lowara panels use an autotransformer with a voltage
that is 70% the value of the line voltage.
The switch to the rated voltage occurs without any
interruptions of the power supply.
Rated voltage
Un = 400 V
Starting current
Us
Is = In x 4÷8 x
= In x 3÷6
Un
Starting torque
Us
Ts = Tn x 2÷3 x
2
= Tn x 1÷1,5
Un
(
(
)
)
(
(
)
)
ASYNCHRONOUS MOTOR STARTING SYSTEMS
Ia
TECHNICAL APPENDIX
Direct
Suitable for low-power motors.
The starting current (Is) is much higher than the
rated current (In).
Starting current Is = In x 4 ÷ 8
Starting torque Ts = Tn x 2 ÷ 3
Indirect
• Star/Delta
The starting current (Is) is three times less than the
direct starting current.
Starting current Is = In x 1.3 ÷ 2.7
Starting torque Ts = Tn x 0.7 ÷ 1
In the star to delta changeover phase (approx. 70
ms) the motor is not supplied and tends to reduce
its rotation speed.
In the case of submersible electric pumps with
power above 10 HP, the modest mass of the rotor
causes a slowdown at changeover, so that the initial
Star supply phase is rendered partially useless.
In such cases we recommend using impedance
panels or an autotransformer.
• Impedances
The motor is started with a voltage which is lower
than the rated one, and which is obtained by means
of impedances.
The Lowara panels use impedances which cut down
to 70% the starting voltage.
The switch to the rated voltage takes place without
any interruptions of the power supply.
Rated voltage Un = 400 V
Starting voltage Us = Un x 0,7 = 280 V
Autotransformer
The pump is started with a voltage which is lower
than the rated one.
The Lowara panels use an autotransformer with a
voltage that is 70% the value of the line voltage.
The switch to the rated voltage occurs without any
interruptions of the power supply.
Rated voltage Un = 400 V
Summary of Contents for Lowara Scuba SC205C
Page 1: ...Cod 191005661 Rev A Ed 06 2017 50 Hz SCUBA Series CLOSE COUPLED SUBMERSIBLE ELECTRIC PUMPS ...
Page 2: ......
Page 13: ...13 TECHNICAL APPENDIX ...
Page 29: ...29 ...
Page 30: ...30 ...
Page 31: ......






































































