





























Chapter 6 How Turfmow 1000 works
When the robot is operating in border mode, it moves directly over the peripheral wire.
The robot may well be programmed to operate in border mode after it has left the charging
station and before it starts mowing with the random movements of the work mode.
The number of times per week the border mode is implemented is set as an
(page 104).
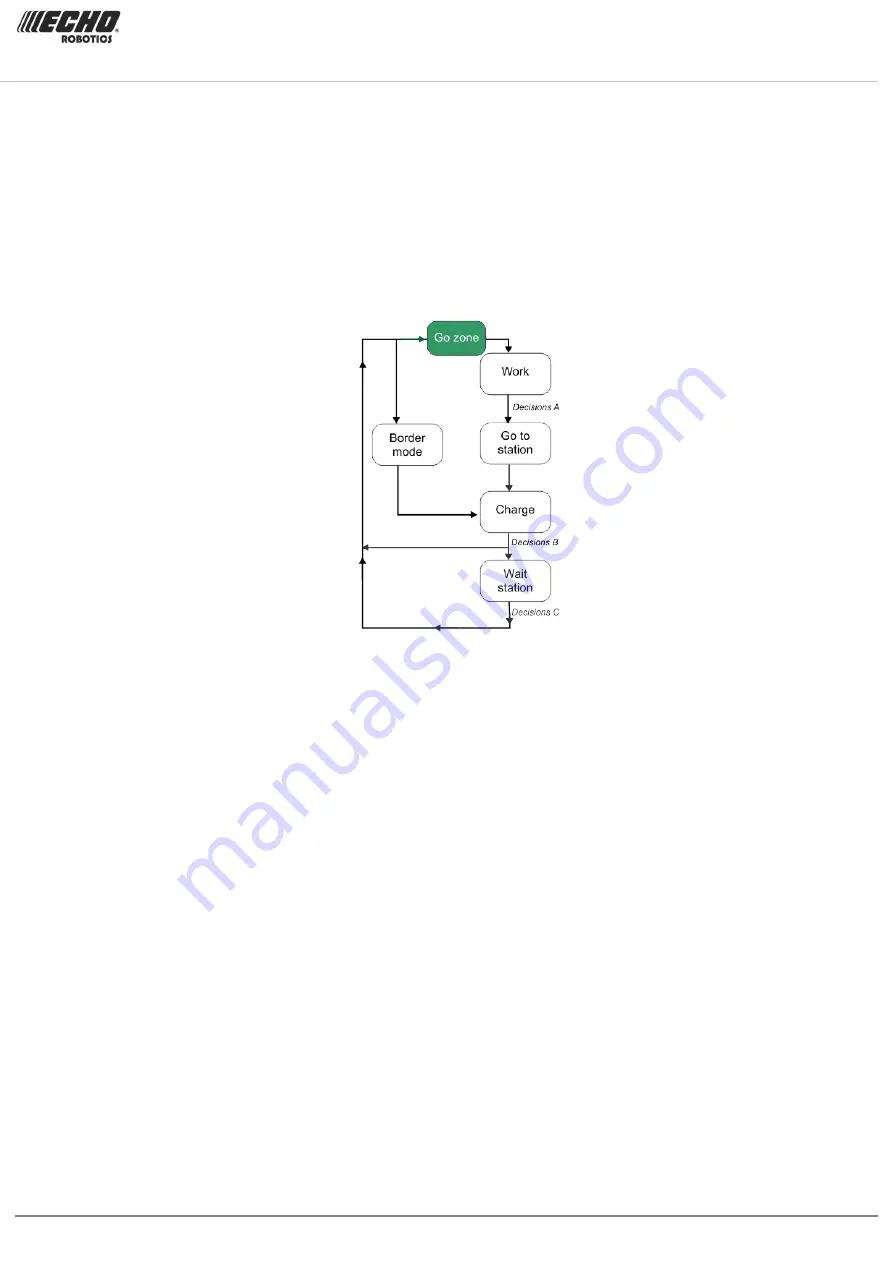
6.1.6 Go zone mode
Figure 26: Go zone mode
The robot will leave the charging station either because the mowing schedule demands it, or
a specific command has been issued.
Go zone mode describes the maneuvers the robot makes to leave the station and start
mowing. These depend on the type of installation configuration.
-
Single field with positioning beacon
(page 31).
-
Multiple mowing fields with positioning beacon
(page 32).
-
Single mowing field with station loop
(page 33).
-
Multiple mowing fields with station loop
(page 34).
6.1.6.1 Single field with positioning beacon
In this configuration, there is only one wire and one parcel (field to be mowed). The robot will
therefor just move into the field to start mowing.
Turfmow 1000 Technician's Manual
Version: Release 3.5
Last updated: 2018-12-20
31







































































