



























Chapter 5 Sensors
5 Sensors
Turfmow 1000 is equipped with a comprehensive set of sensors that ensure its safe
operation. These sensors ensure that the robot can detect, and react if an obstacle lies in its
path or if a small object is in danger of being damaged by the cutting blades.
Stop button
The stop button is easily visible, situated on the top of the robot (see
(page 11)). Hitting it will cause the robot to stop moving and cutting.
The stop button also acts as a lid, which when lifted, provides access to the robot's control
user interface. An instruction must be issued using this control interface in order to restart the
robot.
Obstacle detection sonars
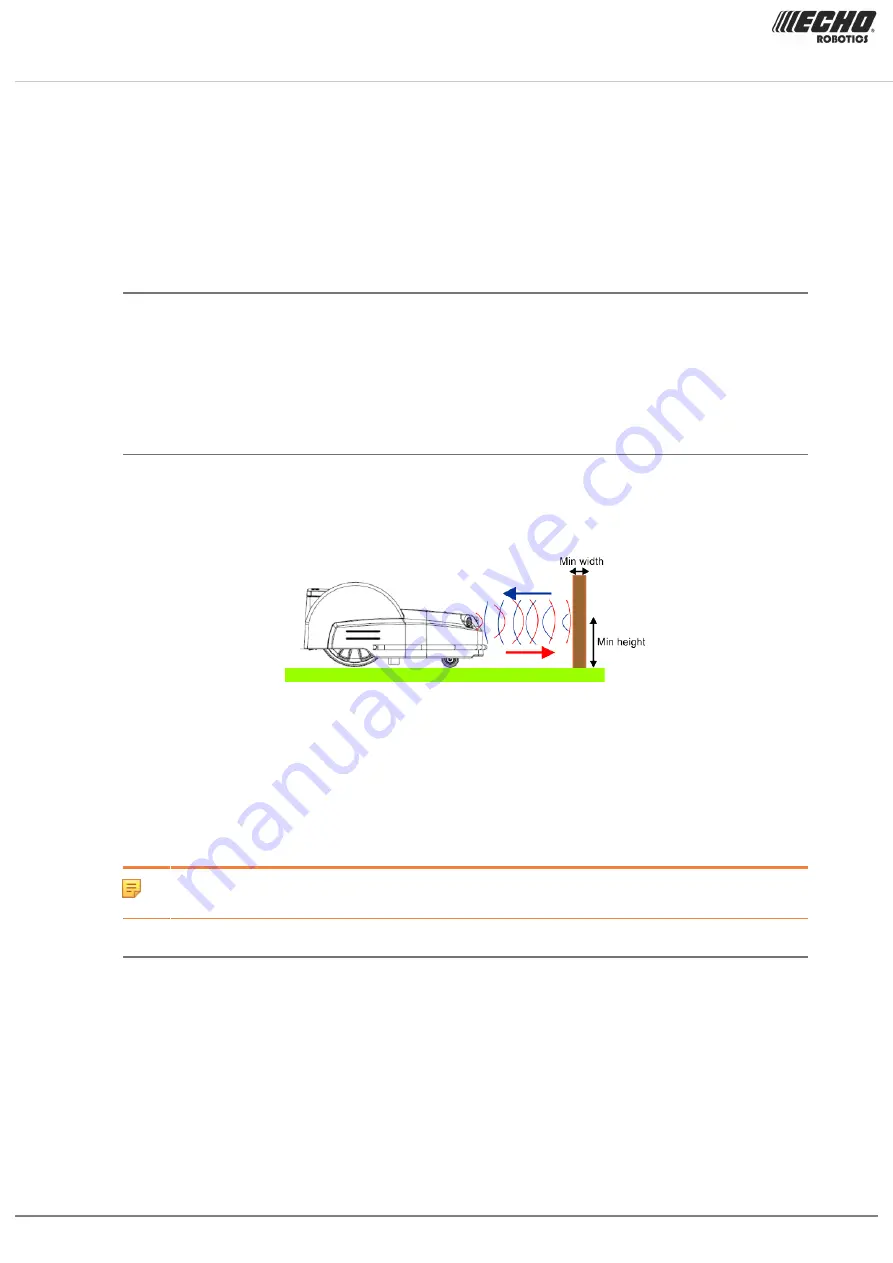
The robot is equipped with a set of 5 sonar sensors to detect obstacles. These sensors
transmit a constant sonar signal (40kHz). When these hit an obstacle the reflected waves are
received by the sensors and the speed of the robot is reduced to 200mm/s (less than 1km/h).
Figure 13: Detection of obstacles by sonar sensors
The robot gently touches the obstacle at low-speed. The robot moves backwards and
chooses a random direction between 60° and 120°.
These sensors can detect objects that are:
•
at least 400mm high
•
at least 70mm wide (from all angles).
Note: If the surface of the obstacle reflects the sonar waves towards the sky, they
should be covered with large bubble wrap.
Bumper
The bumper is a pressure sensor which senses when the robot touches an obstacle. The
robot will be moving at a slow speed because the sonar detectors will have already detected
the obstacle. When the bumper touches the obstacle, the robot will move backwards and then
rotate through an angle until it can avoid the obstacle.
18 Turfmow 1000 Technician's Manual
Version: Release 3.5
Last updated: 2018-12-20







































































